 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Convolutional Memory for Deep Reinforcement Learning
Paper and Code
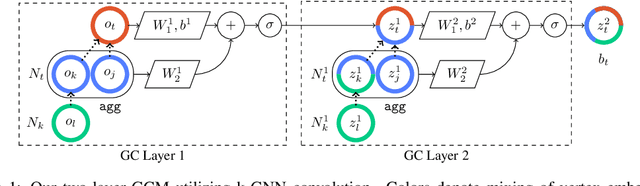
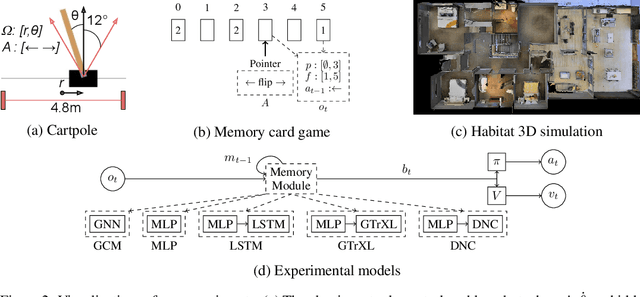
Solving partially-observable Markov decision processes (POMDPs) is critical when applying deep reinforcement learning (DRL) to real-world robotics problems, where agents have an incomplete view of the world. We present graph convolutional memory (GCM) for solving POMDPs using deep reinforcement learning. Unlike recurrent neural networks (RNNs) or transformers, GCM embeds domain-specific priors into the memory recall process via a knowledge graph. By encapsulating priors in the graph, GCM adapts to specific tasks but remains applicable to any DRL task. Using graph convolutions, GCM extracts hierarchical graph features, analogous to image features in a convolutional neural network (CNN). We show GCM outperforms long short-term memory (LSTM), gated transformers for reinforcement learning (GTrXL), and differentiable neural computers (DNCs) on control, long-term non-sequential recall, and 3D navigation tasks while using significantly fewer parameters.