 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph and Recurrent Neural Network-based Vehicle Trajectory Prediction For Highway Driving
Paper and Code
Jul 08, 2021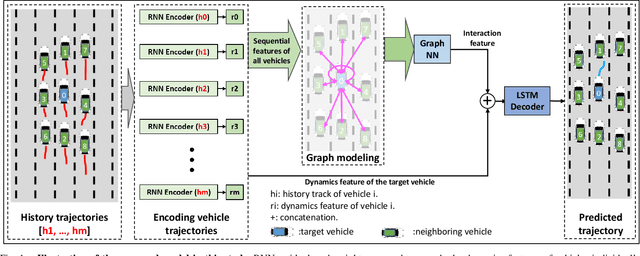
Integrating trajectory prediction to the decision-making and planning modules of modular autonomous driving systems is expected to improve the safety and efficiency of self-driving vehicles. However, a vehicle's future trajectory prediction is a challenging task since it is affected by the social interactive behaviors of neighboring vehicles, and the number of neighboring vehicles can vary in different situations. This work proposes a GNN-RNN based Encoder-Decoder network for interaction-aware trajectory prediction, where vehicles' dynamics features are extracted from their historical tracks using RNN, and the inter-vehicular interaction is represented by a directed graph and encoded using a GNN. The parallelism of GNN implies the proposed method's potential to predict multi-vehicular trajectories simultaneously. Evaluation on the dataset extracted from the NGSIM US-101 dataset shows that the proposed model is able to predict a target vehicle's trajectory in situations with a variable number of surrounding vehicles.