 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPR-Net: Multi-view Layout Estimation via a Geometry-aware Panorama Registration Network
Paper and Code
Oct 20, 2022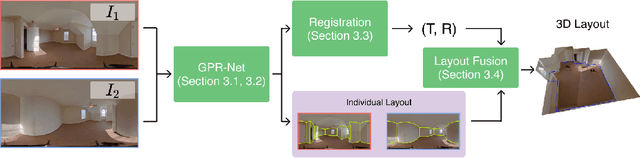

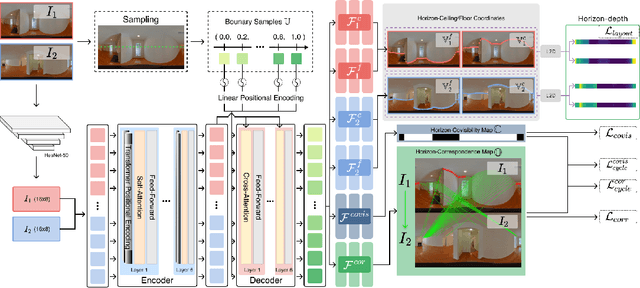

Reconstructing 3D layouts from multiple $360^{\circ}$ panoramas has received increasing attention recently as estimating a complete layout of a large-scale and complex room from a single panorama is very difficult. The state-of-the-art method, called PSMNet, introduces the first learning-based framework that jointly estimates the room layout and registration given a pair of panoramas. However, PSMNet relies on an approximate (i.e., "noisy") registration as input. Obtaining this input requires a solution for wide baseline registration which is a challenging problem. In this work, we present a complete multi-view panoramic layout estimation framework that jointly learns panorama registration and layout estimation given a pair of panoramas without relying on a pose prior. The major improvement over PSMNet comes from a novel Geometry-aware Panorama Registration Network or GPR-Net that effectively tackles the wide baseline registration problem by exploiting the layout geometry and computing fine-grained correspondences on the layout boundaries, instead of the global pixel-space. Our architecture consists of two parts. First, given two panoramas, we adopt a vision transformer to learn a set of 1D horizon features sampled on the panorama. These 1D horizon features encode the depths of individual layout boundary samples and the correspondence and covisibility maps between layout boundaries. We then exploit a non-linear registration module to convert these 1D horizon features into a set of corresponding 2D boundary points on the layout. Finally, we estimate the final relative camera pose via RANSAC and obtain the complete layout simply by taking the union of registered layouts. Experimental results indicate that our method achieves state-of-the-art performance in both panorama registration and layout estimation on a large-scale indoor panorama dataset ZInD.