 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGOReloc: Graph-based Object-Level Relocalization for Visual SLAM
Paper and Code
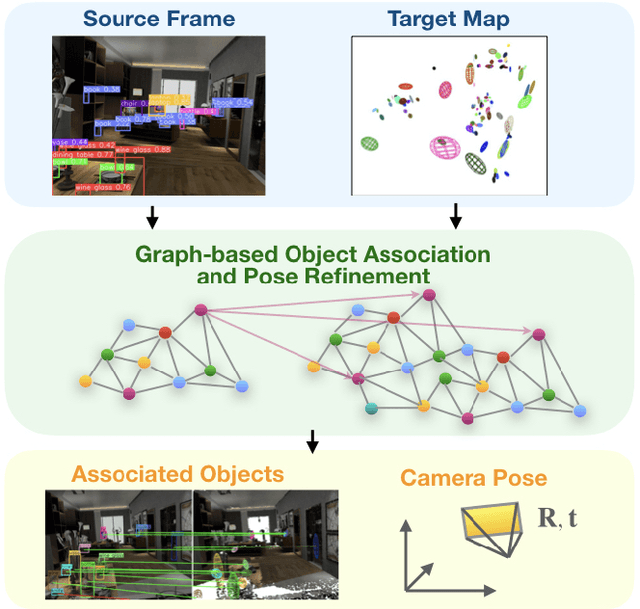
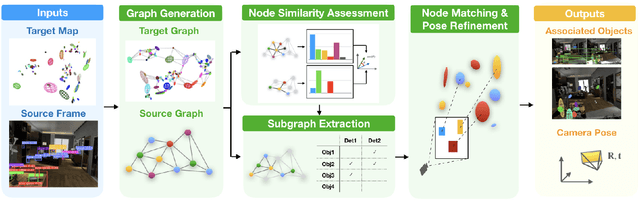
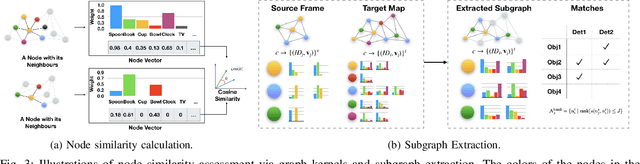

This article introduces a novel method for object-level relocalization of robotic systems. It determines the pose of a camera sensor by robustly associating the object detections in the current frame with 3D objects in a lightweight object-level map. Object graphs, considering semantic uncertainties, are constructed for both the incoming camera frame and the pre-built map. Objects are represented as graph nodes, and each node employs unique semantic descriptors based on our devised graph kernels. We extract a subgraph from the target map graph by identifying potential object associations for each object detection, then refine these associations and pose estimations using a RANSAC-inspired strategy. Experiments on various datasets demonstrate that our method achieves more accurate data association and significantly increases relocalization success rates compared to baseline methods. The implementation of our method is released at \url{https://github.com/yutongwangBIT/GOReloc}.