Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGood Time to Ask: A Learning Framework for Asking for Help in Embodied Visual Navigation
Paper and Code
Jun 20, 2022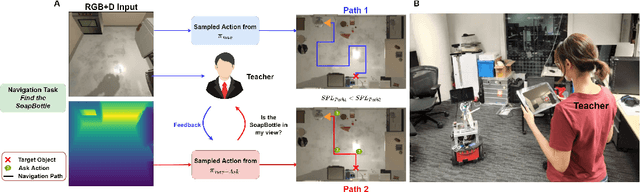
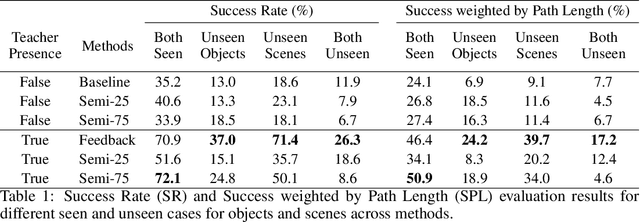
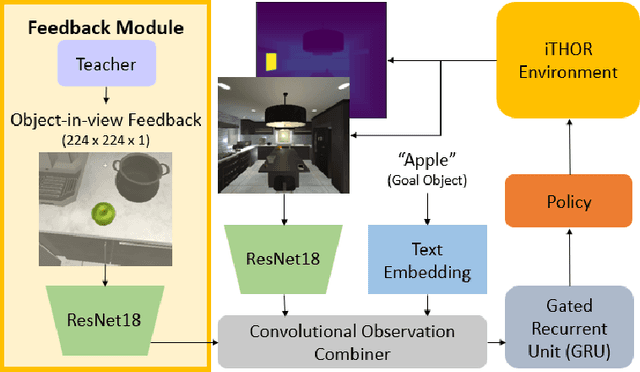
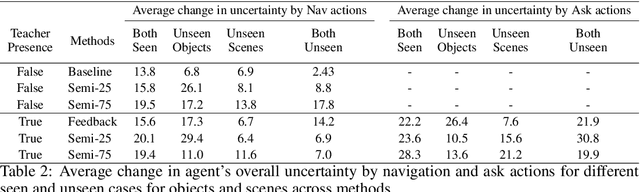
In reality, it is often more efficient to ask for help than to search the entire space to find an object with an unknown location. We present a learning framework that enables an agent to actively ask for help in such embodied visual navigation tasks, where the feedback informs the agent of where the goal is in its view. To emulate the real-world scenario that a teacher may not always be present, we propose a training curriculum where feedback is not always available. We formulate an uncertainty measure of where the goal is and use empirical results to show that through this approach, the agent learns to ask for help effectively while remaining robust when feedback is not available.
* 11 Pages, 3 Figures
View paper on