Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal Estimation-based Adaptive Shared Control for Brain-Machine Interfaces Remote Robot Navigation
Paper and Code
Jul 25, 2024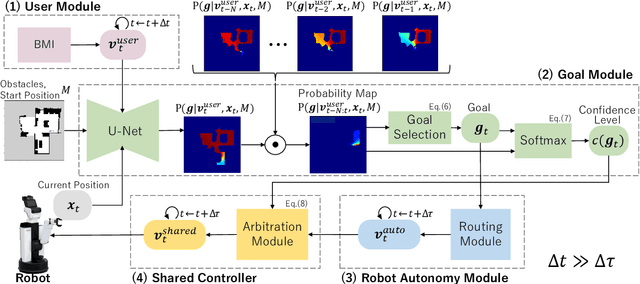
In this study, we propose a shared control method for teleoperated mobile robots using brain-machine interfaces (BMI). The control commands generated through BMI for robot operation face issues of low input frequency, discreteness, and uncertainty due to noise. To address these challenges, our method estimates the user's intended goal from their commands and uses this goal to generate auxiliary commands through the autonomous system that are both at a higher input frequency and more continuous. Furthermore, by defining the confidence level of the estimation, we adaptively calculated the weights for combining user and autonomous commands, thus achieving shared control.
View paper on