 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGNSS-denied geolocalization of UAVs by visual matching of onboard camera images with orthophotos
Paper and Code
Mar 26, 2021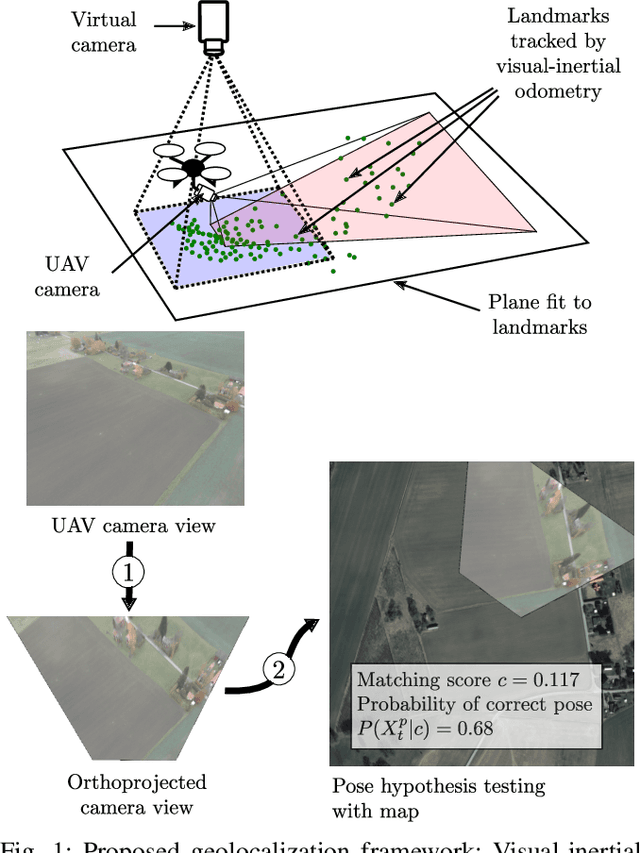



Localization of low-cost unmanned aerial vehicles(UAVs) often relies on Global Navigation Satellite Systems (GNSS). GNSS are susceptible to both natural disruptions to radio signal and intentional jamming and spoofing by an adversary. A typical way to provide georeferenced localization without GNSS for small UAVs is to have a downward-facing camera and match camera images to a map. The downward-facing camera adds cost, size, and weight to the UAV platform and the orientation limits its usability for other purposes. In this work, we propose a Monte-Carlo localization method for georeferenced localization of an UAV requiring no infrastructure using only inertial measurements, a camera facing an arbitrary direction, and an orthoimage map. We perform orthorectification of the UAV image, relying on a local planarity assumption of the environment, relaxing the requirement of downward-pointing camera. We propose a measure of goodness for the matching score of an orthorectified UAV image and a map. We demonstrate that the system is able to localize globally an UAV with modest requirements for initialization and map resolution.