 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobally-Optimal Event Camera Motion Estimation
Paper and Code
Mar 08, 2022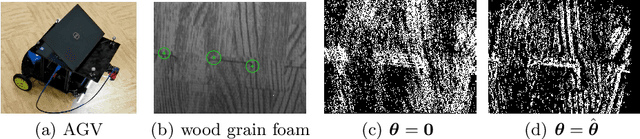

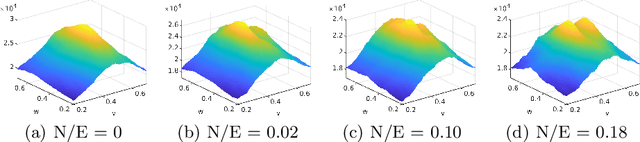

Event cameras are bio-inspired sensors that perform well in HDR conditions and have high temporal resolution. However, different from traditional frame-based cameras, event cameras measure asynchronous pixel-level brightness changes and return them in a highly discretised format, hence new algorithms are needed. The present paper looks at fronto-parallel motion estimation of an event camera. The flow of the events is modeled by a general homographic warping in a space-time volume, and the objective is formulated as a maximisation of contrast within the image of unwarped events. However, in stark contrast to prior art, we derive a globally optimal solution to this generally non-convex problem, and thus remove the dependency on a good initial guess. Our algorithm relies on branch-and-bound optimisation for which we derive novel, recursive upper and lower bounds for six different contrast estimation functions. The practical validity of our approach is supported by a highly successful application to AGV motion estimation with a downward facing event camera, a challenging scenario in which the sensor experiences fronto-parallel motion in front of noisy, fast moving textures.