 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoRefine: Self-Supervised Online Depth Refinement for Accurate Dense Mapping
Paper and Code

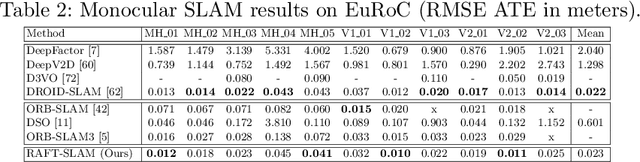
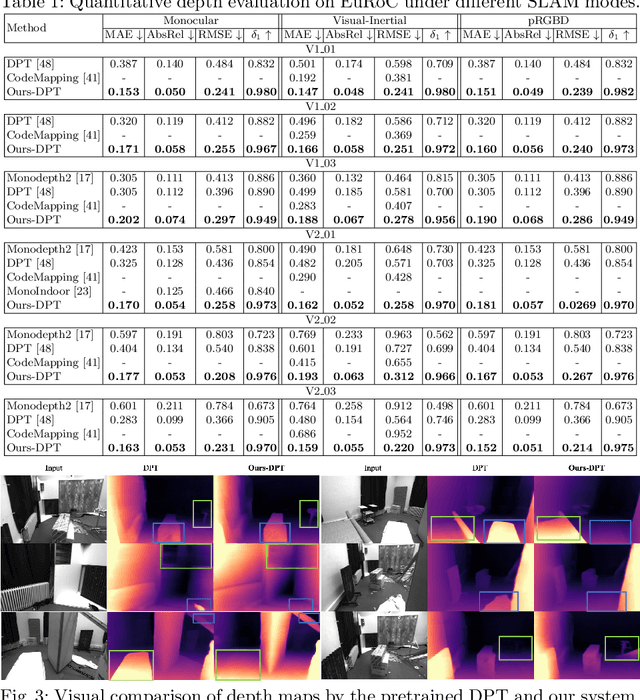

We present a robust and accurate depth refinement system, named GeoRefine, for geometrically-consistent dense mapping from monocular sequences. GeoRefine consists of three modules: a hybrid SLAM module using learning-based priors, an online depth refinement module leveraging self-supervision, and a global mapping module via TSDF fusion. The proposed system is online by design and achieves great robustness and accuracy via: (i) a robustified hybrid SLAM that incorporates learning-based optical flow and/or depth; (ii) self-supervised losses that leverage SLAM outputs and enforce long-term geometric consistency; (iii) careful system design that avoids degenerate cases in online depth refinement. We extensively evaluate GeoRefine on multiple public datasets and reach as low as $5\%$ absolute relative depth errors.