 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometrically Mappable Image Features
Paper and Code

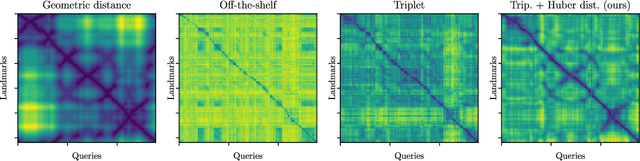
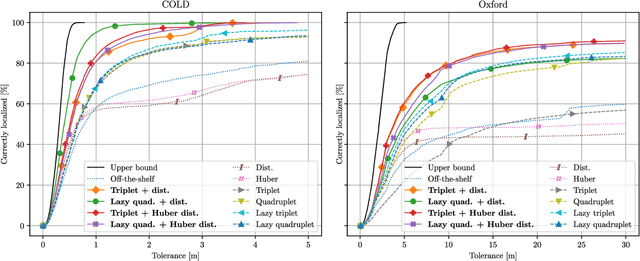

Vision-based localization of an agent in a map is an important problem in robotics and computer vision. In that context, localization by learning matchable image features is gaining popularity due to recent advances in machine learning. Features that uniquely describe the visual contents of images have a wide range of applications, including image retrieval and understanding. In this work, we propose a method that learns image features targeted for image-retrieval-based localization. Retrieval-based localization has several benefits, such as easy maintenance and quick computation. However, the state-of-the-art features only provide visual similarity scores which do not explicitly reveal the geometric distance between query and retrieved images. Knowing this distance is highly desirable for accurate localization, especially when the reference images are sparsely distributed in the scene. Therefore, we propose a novel loss function for learning image features which are both visually representative and geometrically relatable. This is achieved by guiding the learning process such that the feature and geometric distances between images are directly proportional. In our experiments we show that our features not only offer significantly better localization accuracy, but also allow to estimate the trajectory of a query sequence in absence of the reference images.