 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Reinforcement Learning: The Case of Cartesian Space Orientation
Paper and Code
Oct 14, 2022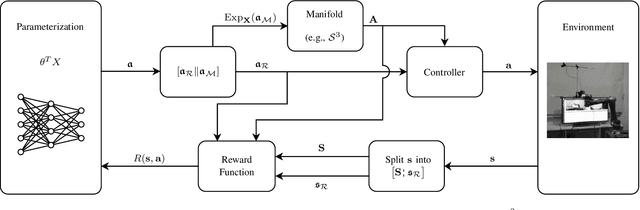
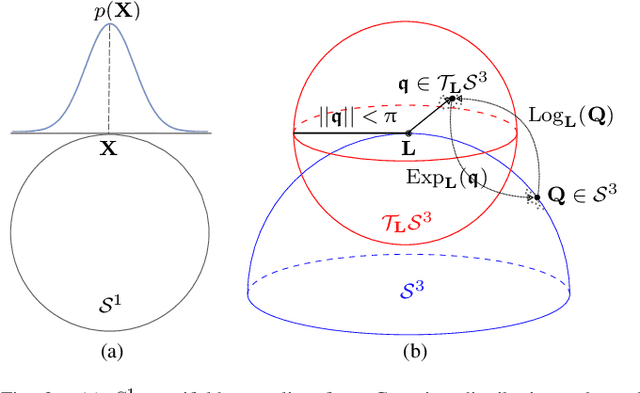
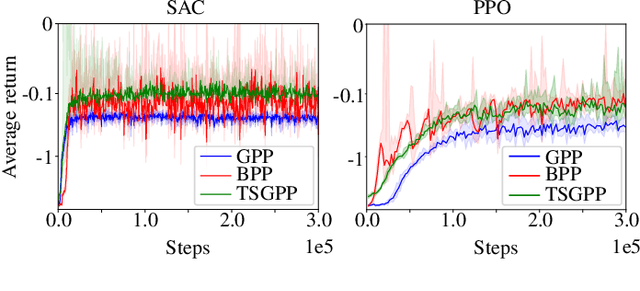
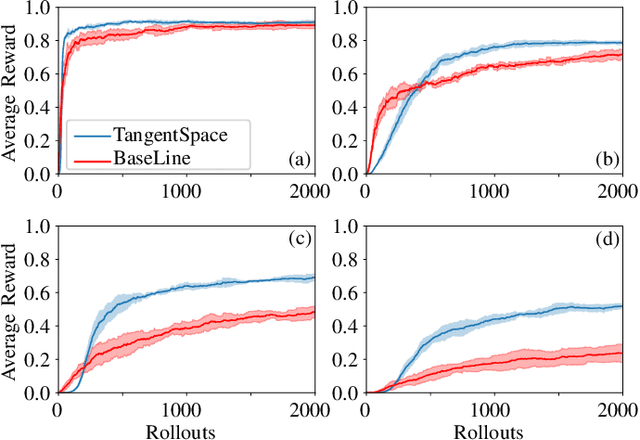
Reinforcement learning (RL) enables an agent to learn by trial and error while interacting with a dynamic environment. Traditionally, RL is used to learn and predict Euclidean robotic manipulation skills like positions, velocities, and forces. However, in robotics, it is common to have non-Euclidean data like orientation or stiffness, and neglecting their geometric nature can adversely affect learning performance and accuracy. In this paper, we propose a novel framework for RL by using Riemannian geometry, and show how it can be applied to learn manipulation skills with a specific geometric structure (e.g., robot's orientation in the task space). The proposed framework is suitable for any policy representation and is independent of the algorithm choice. Specifically, we propose to apply policy parameterization and learning on the tangent space, then map the learned actions back to the appropriate manifold (e.g., the S3 manifold for orientation). Therefore, we introduce a geometrically grounded pre- and post-processing step into the typical RL pipeline, which opens the door to all algorithms designed for Euclidean space to learn from non-Euclidean data without changes. Experimental results, obtained both in simulation and on a real robot, support our hypothesis that learning on the tangent space is more accurate and converges to a better solution than approximating non-Euclidean data.