 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration of Human-aware Navigation Maps using Graph Neural Networks
Paper and Code
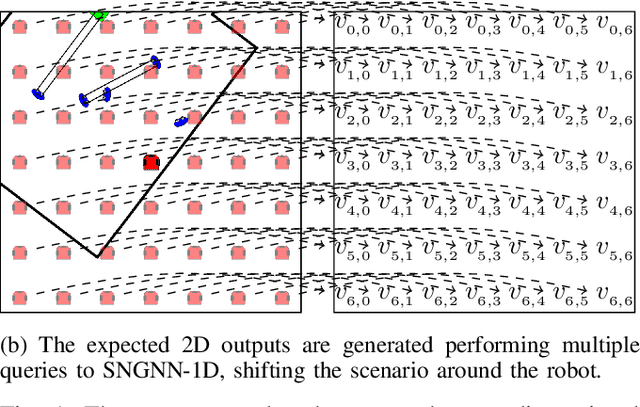
Minimising the discomfort caused by robots when navigating in social situations is crucial for them to be accepted. The paper presents a machine learning-based framework that bootstraps existing one-dimensional datasets to generate a cost map dataset and a model combining Graph Neural Network and Convolutional Neural Network layers to produce cost maps for human-aware navigation in real-time. The proposed framework is evaluated against the original one-dimensional dataset and in simulated navigation tasks. The results outperform similar state-of-the-art-methods considering the accuracy on the dataset and the navigation metrics used. The applications of the proposed framework are not limited to human-aware navigation, it could be applied to other fields where map generation is needed.