 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Large-Scale Trajectories Efficiently using Double Descriptions of Polynomials
Paper and Code
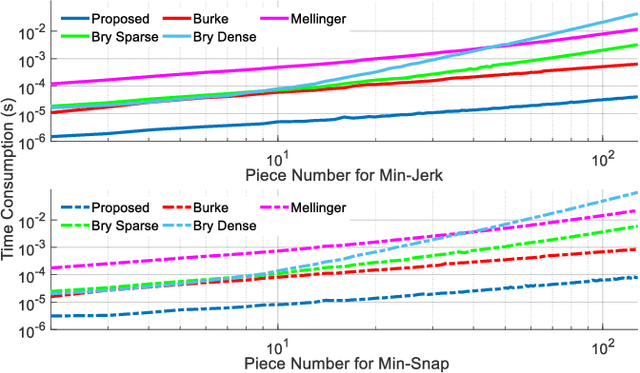
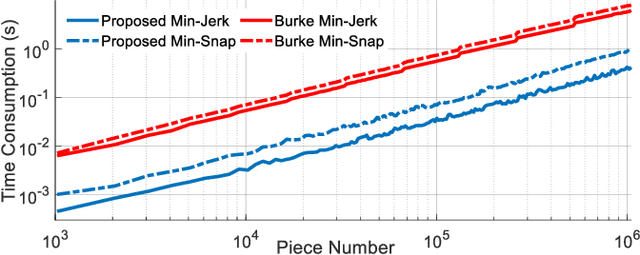

For quadrotor trajectory planning, describing a polynomial trajectory through coefficients and end-derivatives both enjoy their own convenience in energy minimization. We name them double descriptions of polynomial trajectories. The transformation between them, causing most of the inefficiency and instability, is formally analyzed in this paper. Leveraging its analytic structure, we design a linear-complexity scheme for both jerk/snap minimization and parameter gradient evaluation, which possesses efficiency, stability, flexibility, and scalability. With the help of our scheme, generating an energy optimal (minimum snap) trajectory only costs 1 $\mu s$ per piece at the scale up to 1,000,000 pieces. Moreover, generating large-scale energy-time optimal trajectories is also accelerated by an order of magnitude against conventional methods.