 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGelFlow: Self-supervised Learning of Optical Flow for Vision-Based Tactile Sensor Displacement Measurement
Paper and Code
Sep 13, 2023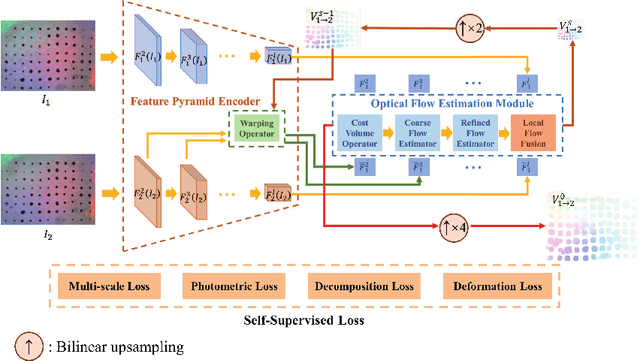
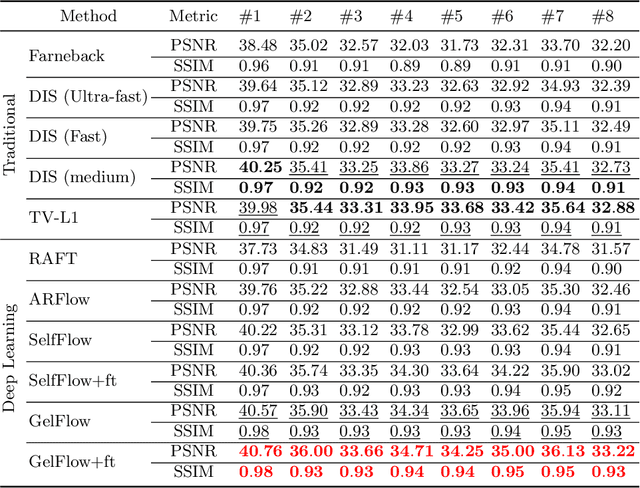
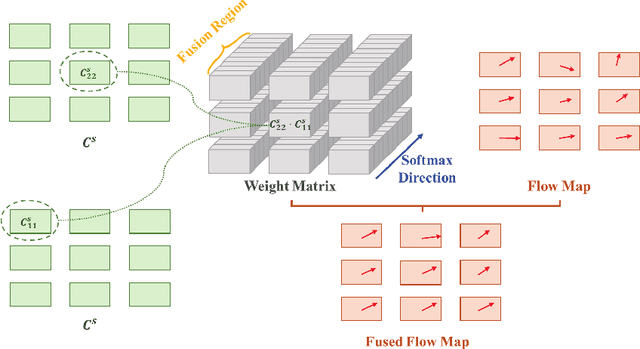
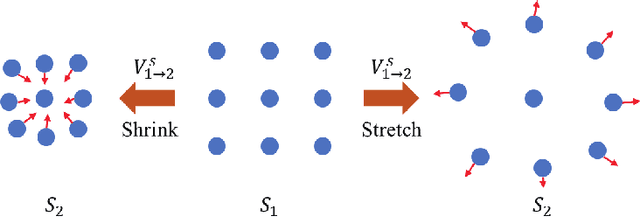
High-resolution multi-modality information acquired by vision-based tactile sensors can support more dexterous manipulations for robot fingers. Optical flow is low-level information directly obtained by vision-based tactile sensors, which can be transformed into other modalities like force, geometry and depth. Current vision-tactile sensors employ optical flow methods from OpenCV to estimate the deformation of markers in gels. However, these methods need to be more precise for accurately measuring the displacement of markers during large elastic deformation of the gel, as this can significantly impact the accuracy of downstream tasks. This study proposes a self-supervised optical flow method based on deep learning to achieve high accuracy in displacement measurement for vision-based tactile sensors. The proposed method employs a coarse-to-fine strategy to handle large deformations by constructing a multi-scale feature pyramid from the input image. To better deal with the elastic deformation caused by the gel, the Helmholtz velocity decomposition constraint combined with the elastic deformation constraint are adopted to address the distortion rate and area change rate, respectively. A local flow fusion module is designed to smooth the optical flow, taking into account the prior knowledge of the blurred effect of gel deformation. We trained the proposed self-supervised network using an open-source dataset and compared it with traditional and deep learning-based optical flow methods. The results show that the proposed method achieved the highest displacement measurement accuracy, thereby demonstrating its potential for enabling more precise measurement of downstream tasks using vision-based tactile sensors.