 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGDN: A Coarse-To-Fine Representation for End-To-End 6-DoF Grasp Detection
Paper and Code
Nov 11, 2020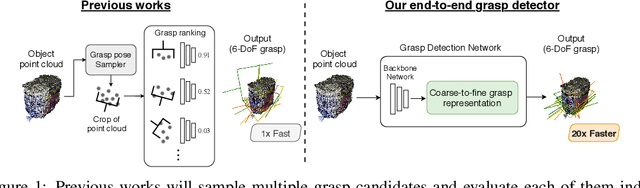
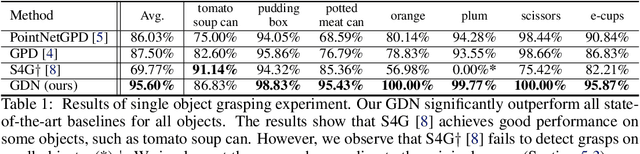
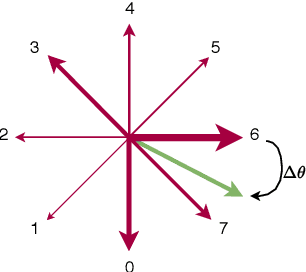
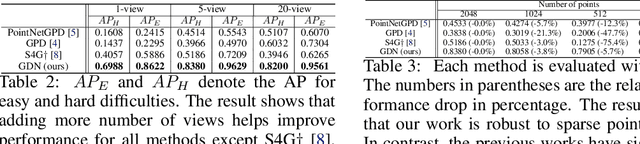
We proposed an end-to-end grasp detection network, Grasp Detection Network (GDN), cooperated with a novel coarse-to-fine (C2F) grasp representation design to detect diverse and accurate 6-DoF grasps based on point clouds. Compared to previous two-stage approaches which sample and evaluate multiple grasp candidates, our architecture is at least 20 times faster. It is also 8% and 40% more accurate in terms of the success rate in single object scenes and the complete rate in clutter scenes, respectively. Our method shows superior results among settings with different number of views and input points. Moreover, we propose a new AP-based metric which considers both rotation and transition errors, making it a more comprehensive evaluation tool for grasp detection models.