 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussReg: Fast 3D Registration with Gaussian Splatting
Paper and Code
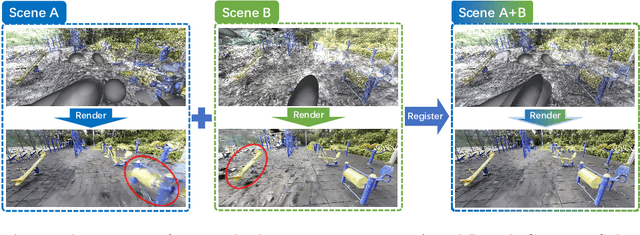
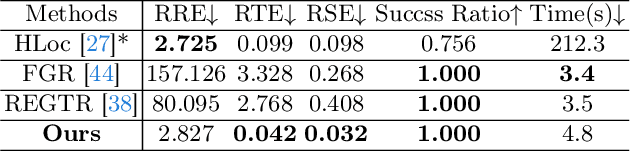
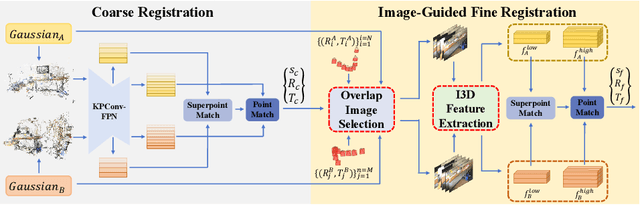
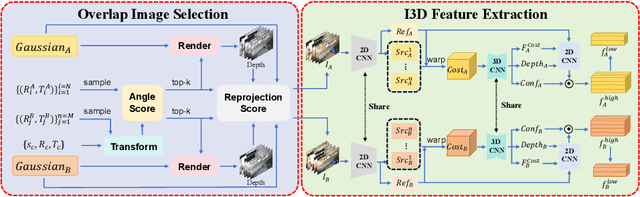
Point cloud registration is a fundamental problem for large-scale 3D scene scanning and reconstruction. With the help of deep learning, registration methods have evolved significantly, reaching a nearly-mature stage. As the introduction of Neural Radiance Fields (NeRF), it has become the most popular 3D scene representation as its powerful view synthesis capabilities. Regarding NeRF representation, its registration is also required for large-scale scene reconstruction. However, this topic extremly lacks exploration. This is due to the inherent challenge to model the geometric relationship among two scenes with implicit representations. The existing methods usually convert the implicit representation to explicit representation for further registration. Most recently, Gaussian Splatting (GS) is introduced, employing explicit 3D Gaussian. This method significantly enhances rendering speed while maintaining high rendering quality. Given two scenes with explicit GS representations, in this work, we explore the 3D registration task between them. To this end, we propose GaussReg, a novel coarse-to-fine framework, both fast and accurate. The coarse stage follows existing point cloud registration methods and estimates a rough alignment for point clouds from GS. We further newly present an image-guided fine registration approach, which renders images from GS to provide more detailed geometric information for precise alignment. To support comprehensive evaluation, we carefully build a scene-level dataset called ScanNet-GSReg with 1379 scenes obtained from the ScanNet dataset and collect an in-the-wild dataset called GSReg. Experimental results demonstrate our method achieves state-of-the-art performance on multiple datasets. Our GaussReg is 44 times faster than HLoc (SuperPoint as the feature extractor and SuperGlue as the matcher) with comparable accuracy.