 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuzzy-Depth Objects Grasping Based on FSG Algorithm and a Soft Robotic Hand
Paper and Code
Oct 21, 2021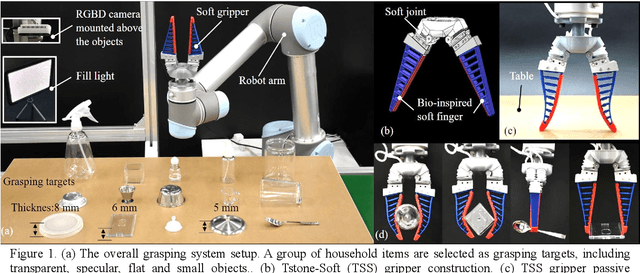
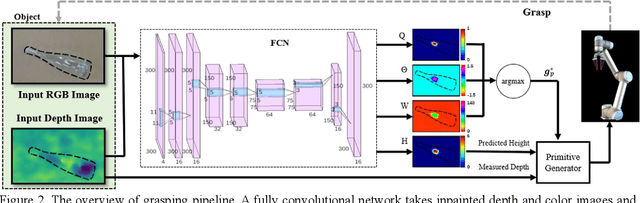
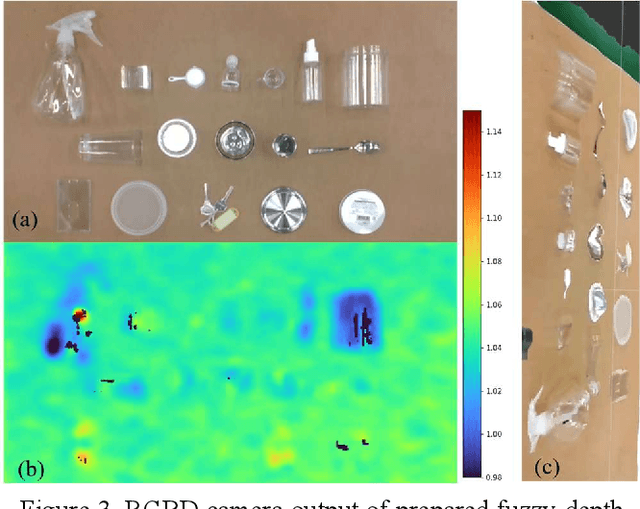

Autonomous grasping is an important factor for robots physically interacting with the environment and executing versatile tasks. However, a universally applicable, cost-effective, and rapidly deployable autonomous grasping approach is still limited by those target objects with fuzzy-depth information. Examples are transparent, specular, flat, and small objects whose depth is difficult to be accurately sensed. In this work, we present a solution to those fuzzy-depth objects. The framework of our approach includes two major components: one is a soft robotic hand and the other one is a Fuzzy-depth Soft Grasping (FSG) algorithm. The soft hand is replaceable for most existing soft hands/grippers with body compliance. FSG algorithm exploits both RGB and depth images to predict grasps while not trying to reconstruct the whole scene. Two grasping primitives are designed to further increase robustness. The proposed method outperforms reference baselines in unseen fuzzy-depth objects grasping experiments (84% success rate).