 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion of Head and Full-Body Detectors for Multi-Object Tracking
Paper and Code
Apr 24, 2018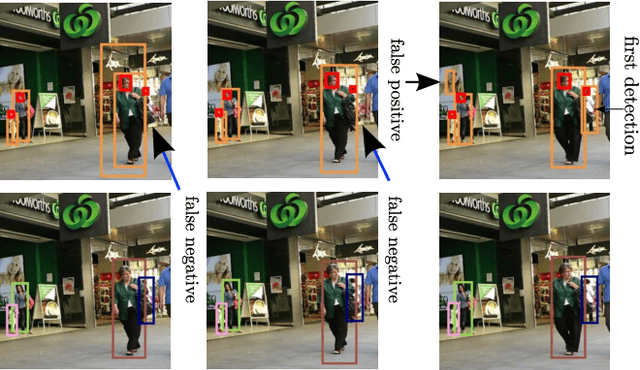

In order to track all persons in a scene, the tracking-by-detection paradigm has proven to be a very effective approach. Yet, relying solely on a single detector is also a major limitation, as useful image information might be ignored. Consequently, this work demonstrates how to fuse two detectors into a tracking system. To obtain the trajectories, we propose to formulate tracking as a weighted graph labeling problem, resulting in a binary quadratic program. As such problems are NP-hard, the solution can only be approximated. Based on the Frank-Wolfe algorithm, we present a new solver that is crucial to handle such difficult problems. Evaluation on pedestrian tracking is provided for multiple scenarios, showing superior results over single detector tracking and standard QP-solvers. Finally, our tracker ranks 2nd on the MOT16 benchmark and 1st on the new MOT17 benchmark, outperforming over 90 trackers.