 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion-Aware Point Convolution for Online Semantic 3D Scene Segmentation
Paper and Code

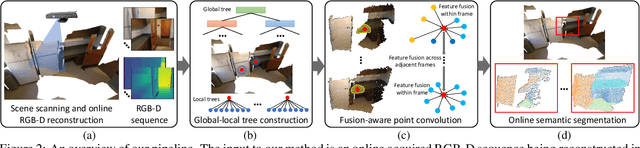
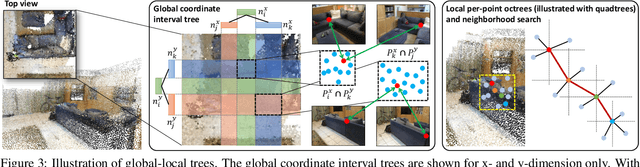
Online semantic 3D segmentation in company with real-time RGB-D reconstruction poses special challenges such as how to perform 3D convolution directly over the progressively fused 3D geometric data, and how to smartly fuse information from frame to frame. We propose a novel fusion-aware 3D point convolution which operates directly on the geometric surface being reconstructed and exploits effectively the inter-frame correlation for high quality 3D feature learning. This is enabled by a dedicated dynamic data structure which organizes the online acquired point cloud with global-local trees. Globally, we compile the online reconstructed 3D points into an incrementally growing coordinate interval tree, enabling fast point insertion and neighborhood query. Locally, we maintain the neighborhood information for each point using an octree whose construction benefits from the fast query of the global tree.Both levels of trees update dynamically and help the 3D convolution effectively exploits the temporal coherence for effective information fusion across RGB-D frames.