 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFundamental Matrices from Moving Objects Using Line Motion Barcodes
Paper and Code
Jul 26, 2016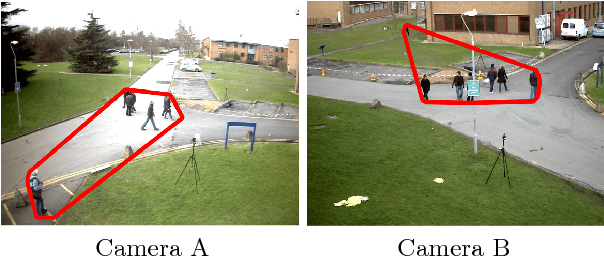
Computing the epipolar geometry between cameras with very different viewpoints is often very difficult. The appearance of objects can vary greatly, and it is difficult to find corresponding feature points. Prior methods searched for corresponding epipolar lines using points on the convex hull of the silhouette of a single moving object. These methods fail when the scene includes multiple moving objects. This paper extends previous work to scenes having multiple moving objects by using the "Motion Barcodes", a temporal signature of lines. Corresponding epipolar lines have similar motion barcodes, and candidate pairs of corresponding epipoar lines are found by the similarity of their motion barcodes. As in previous methods we assume that cameras are relatively stationary and that moving objects have already been extracted using background subtraction.