Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully-simulated Integration of Scamp5d Vision System and Robot Simulator
Paper and Code
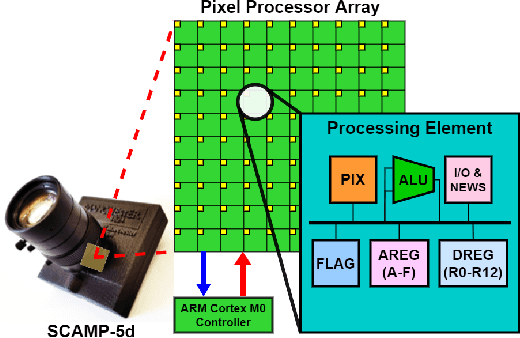

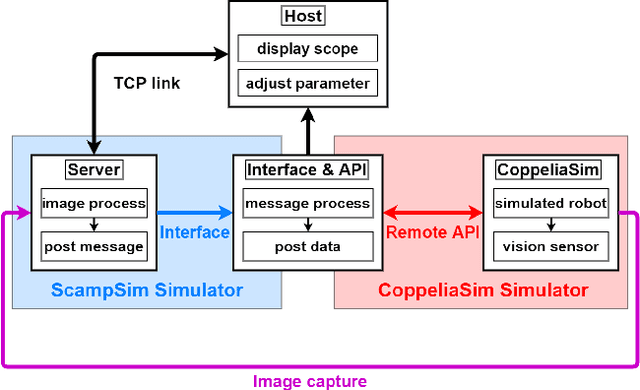
This paper proposed a fully-simulated environment by integrating an on-sensor visual computing device, SCAMP, and CoppeliaSim robot simulator via interface and remote API. Within this platform, a mobile robot obstacle avoidance and target navigation with pre-set barriers is exploited with on-sensor visual computing, where images are captured in a robot simulator and processed by an on-sensor processing server after being transferred. We made our developed platform and associated algorithms for mobile robot navigation available online.
* 6 pages, 13 figures
View paper on