 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Persistent Spatial Data Structures for Efficient Queries in Path-Dependent Motion Planning Applications
Paper and Code
Jun 06, 2022


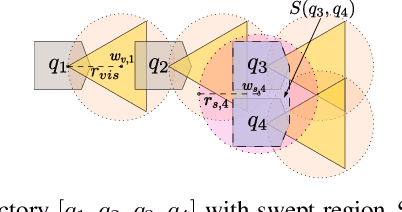
Motion planning is a ubiquitous problem that is often a bottleneck in robotic applications. We demonstrate that motion planning problems such as minimum constraint removal, belief-space planning, and visibility-aware motion planning (VAMP) benefit from a path-dependent formulation, in which the state at a search node is represented implicitly by the path to that node. A naive approach to computing the feasibility of a successor node in such a path-dependent formulation takes time linear in the path length to the node, in contrast to a (possibly very large) constant time for a more typical search formulation. For long-horizon plans, performing this linear-time computation, which we call the lookback, for each node becomes prohibitive. To improve upon this, we introduce the use of a fully persistent spatial data structure (FPSDS), which bounds the size of the lookback. We then focus on the application of the FPSDS in VAMP, which involves incremental geometric computations that can be accelerated by filtering configurations with bounding volumes using nearest-neighbor data structures. We demonstrate an asymptotic and practical improvement in the runtime of finding VAMP solutions in several illustrative domains. To the best of our knowledge, this is the first use of a fully persistent data structure for accelerating motion planning.