 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrontier Semantic Exploration for Visual Target Navigation
Paper and Code
Apr 11, 2023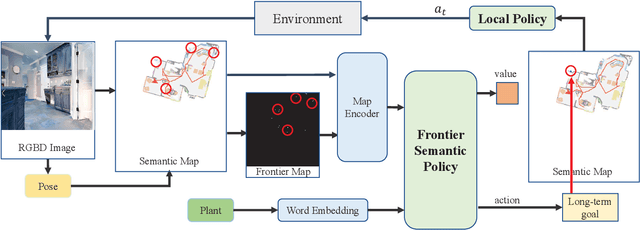
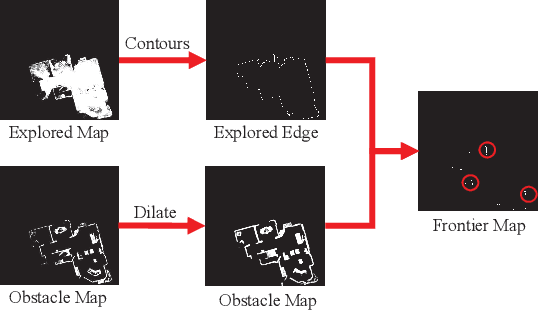
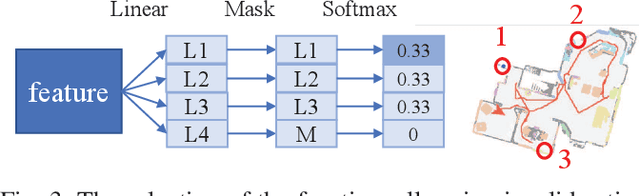

This work focuses on the problem of visual target navigation, which is very important for autonomous robots as it is closely related to high-level tasks. To find a special object in unknown environments, classical and learning-based approaches are fundamental components of navigation that have been investigated thoroughly in the past. However, due to the difficulty in the representation of complicated scenes and the learning of the navigation policy, previous methods are still not adequate, especially for large unknown scenes. Hence, we propose a novel framework for visual target navigation using the frontier semantic policy. In this proposed framework, the semantic map and the frontier map are built from the current observation of the environment. Using the features of the maps and object category, deep reinforcement learning enables to learn a frontier semantic policy which can be used to select a frontier cell as a long-term goal to explore the environment efficiently. Experiments on Gibson and Habitat-Matterport 3D (HM3D) demonstrate that the proposed framework significantly outperforms existing map-based methods in terms of success rate and efficiency. Ablation analysis also indicates that the proposed approach learns a more efficient exploration policy based on the frontiers. A demonstration is provided to verify the applicability of applying our model to real-world transfer. The supplementary video and code can be accessed via the following link: https://sites.google.com/view/fsevn.