 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Scratch to Sketch: Deep Decoupled Hierarchical Reinforcement Learning for Robotic Sketching Agent
Paper and Code
Aug 09, 2022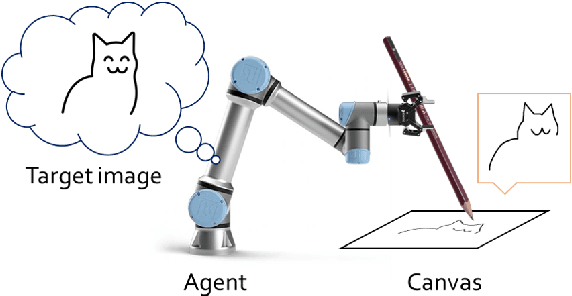
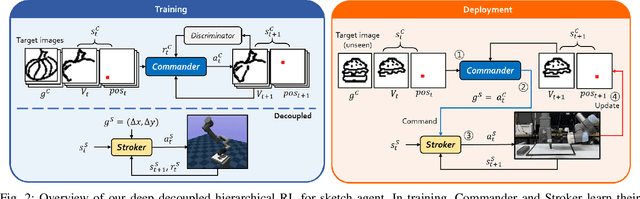
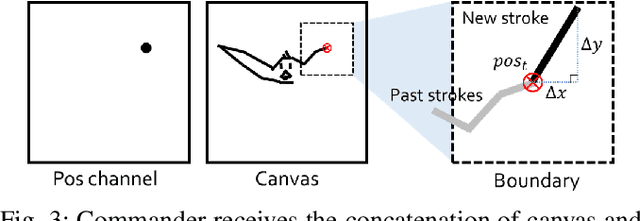
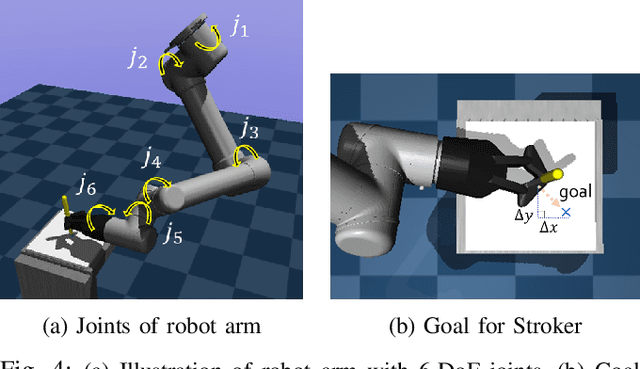
We present an automated learning framework for a robotic sketching agent that is capable of learning stroke-based rendering and motor control simultaneously. We formulate the robotic sketching problem as a deep decoupled hierarchical reinforcement learning; two policies for stroke-based rendering and motor control are learned independently to achieve sub-tasks for drawing, and form a hierarchy when cooperating for real-world drawing. Without hand-crafted features, drawing sequences or trajectories, and inverse kinematics, the proposed method trains the robotic sketching agent from scratch. We performed experiments with a 6-DoF robot arm with 2F gripper to sketch doodles. Our experimental results show that the two policies successfully learned the sub-tasks and collaborated to sketch the target images. Also, the robustness and flexibility were examined by varying drawing tools and surfaces.