 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Low to High Order Motion Planners: Safe Robot Navigation using Motion Prediction and Reference Governor
Paper and Code
Feb 25, 2022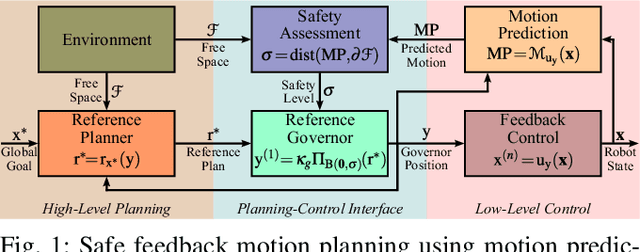


Safe navigation around obstacles is a fundamental challenge for highly dynamic robots. The state-of-the-art approach for adapting simple reference path planners to complex robot dynamics using trajectory optimization and tracking control is brittle and requires significant replanning cycles. In this paper, we introduce a novel feedback motion planning framework that extends the applicability of low-order (e.g. position-/velocity-controlled) reference motion planners to high-order (e.g., acceleration-/jerk-controlled) robot models using motion prediction and reference governors. We use predicted robot motion range for safety assessment and establish a bidirectional interface between high-level planning and low-level control via a reference governor. We describe the generic fundamental building blocks of our feedback motion planning framework and give specific example constructions for motion control, prediction, and reference planning. We prove the correctness of our planning framework and demonstrate its performance in numerical simulations. We conclude that accurate motion prediction is crucial for closing the gap between high-level planning and low-level control.