 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Explicit Communication to Tacit Cooperation:A Novel Paradigm for Cooperative MARL
Paper and Code
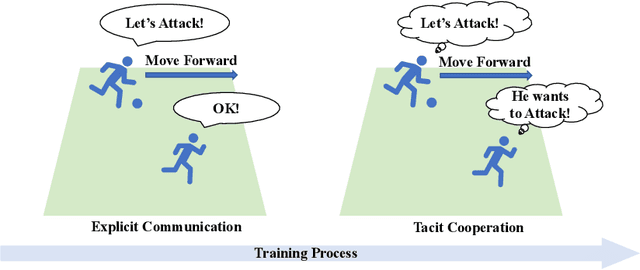
Centralized training with decentralized execution (CTDE) is a widely-used learning paradigm that has achieved significant success in complex tasks. However, partial observability issues and the absence of effectively shared signals between agents often limit its effectiveness in fostering cooperation. While communication can address this challenge, it simultaneously reduces the algorithm's practicality. Drawing inspiration from human team cooperative learning, we propose a novel paradigm that facilitates a gradual shift from explicit communication to tacit cooperation. In the initial training stage, we promote cooperation by sharing relevant information among agents and concurrently reconstructing this information using each agent's local trajectory. We then combine the explicitly communicated information with the reconstructed information to obtain mixed information. Throughout the training process, we progressively reduce the proportion of explicitly communicated information, facilitating a seamless transition to fully decentralized execution without communication. Experimental results in various scenarios demonstrate that the performance of our method without communication can approaches or even surpasses that of QMIX and communication-based methods.