 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFriendNet: Detection-Friendly Dehazing Network
Paper and Code
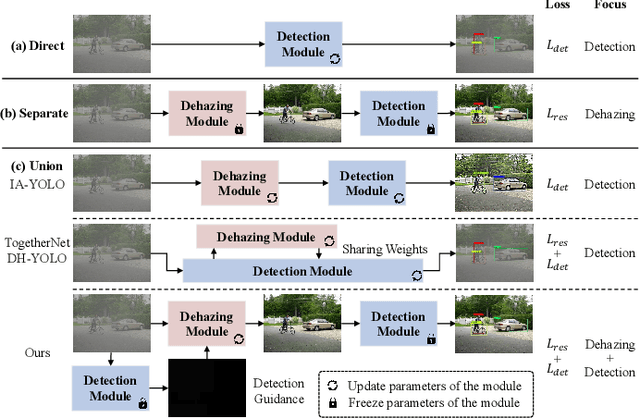


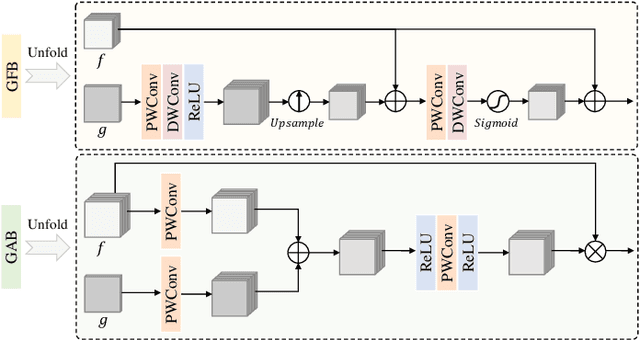
Adverse weather conditions often impair the quality of captured images, inevitably inducing cutting-edge object detection models for advanced driver assistance systems (ADAS) and autonomous driving. In this paper, we raise an intriguing question: can the combination of image restoration and object detection enhance detection performance in adverse weather conditions? To answer it, we propose an effective architecture that bridges image dehazing and object detection together via guidance information and task-driven learning to achieve detection-friendly dehazing, termed FriendNet. FriendNet aims to deliver both high-quality perception and high detection capacity. Different from existing efforts that intuitively treat image dehazing as pre-processing, FriendNet establishes a positive correlation between these two tasks. Clean features generated by the dehazing network potentially contribute to improvements in object detection performance. Conversely, object detection crucially guides the learning process of the image dehazing network under the task-driven learning scheme. We shed light on how downstream tasks can guide upstream dehazing processes, considering both network architecture and learning objectives. We design Guidance Fusion Block (GFB) and Guidance Attention Block (GAB) to facilitate the integration of detection information into the network. Furthermore, the incorporation of the detection task loss aids in refining the optimization process. Additionally, we introduce a new Physics-aware Feature Enhancement Block (PFEB), which integrates physics-based priors to enhance the feature extraction and representation capabilities. Extensive experiments on synthetic and real-world datasets demonstrate the superiority of our method over state-of-the-art methods on both image quality and detection precision. Our source code is available at https://github.com/fanyihua0309/FriendNet.