 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFriction-Scaled Vibrotactile Feedback for Real-Time Slip Detection in Manipulation using Robotic Sixth Finger
Paper and Code
Mar 19, 2025
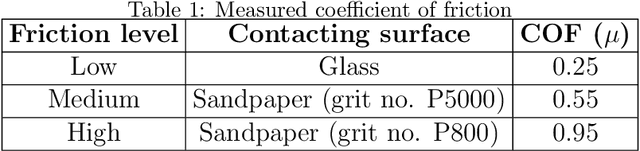

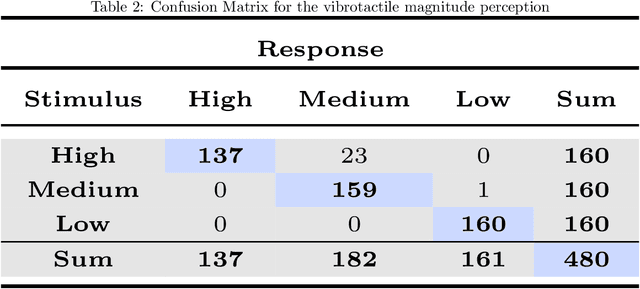
The integration of extra-robotic limbs/fingers to enhance and expand motor skills, particularly for grasping and manipulation, possesses significant challenges. The grasping performance of existing limbs/fingers is far inferior to that of human hands. Human hands can detect onset of slip through tactile feedback originating from tactile receptors during the grasping process, enabling precise and automatic regulation of grip force. The frictional information is perceived by humans depending upon slip happening between finger and object. Enhancing this capability in extra-robotic limbs or fingers used by humans is challenging. To address this challenge, this paper introduces novel approach to communicate frictional information to users through encoded vibrotactile cues. These cues are conveyed on onset of incipient slip thus allowing users to perceive friction and ultimately use this information to increase force to avoid dropping of object. In a 2-alternative forced-choice protocol, participants gripped and lifted a glass under three different frictional conditions, applying a normal force of 3.5 N. After reaching this force, glass was gradually released to induce slip. During this slipping phase, vibrations scaled according to static coefficient of friction were presented to users, reflecting frictional conditions. The results suggested an accuracy of 94.53 p/m 3.05 (mean p/mSD) in perceiving frictional information upon lifting objects with varying friction. The results indicate effectiveness of using vibrotactile feedback for sensory feedback, allowing users of extra-robotic limbs or fingers to perceive frictional information. This enables them to assess surface properties and adjust grip force according to frictional conditions, enhancing their ability to grasp, manipulate objects more effectively.