 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFOVEA: Foveated Image Magnification for Autonomous Navigation
Paper and Code
Aug 27, 2021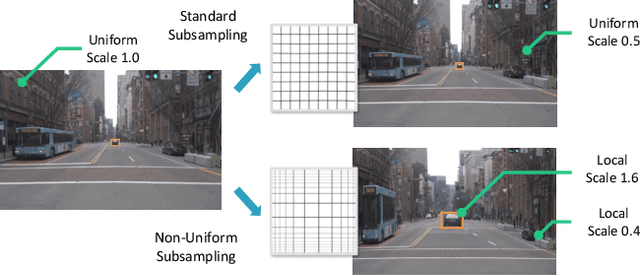

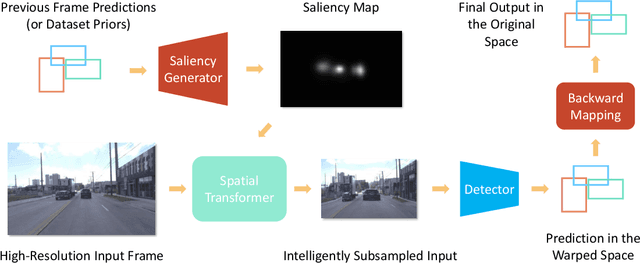
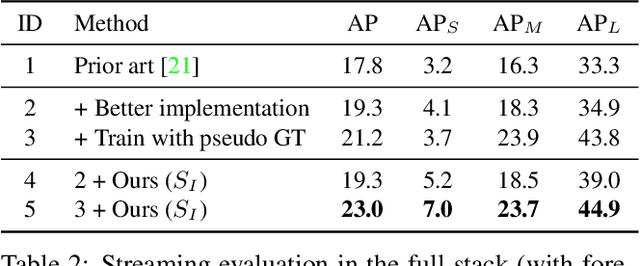
Efficient processing of high-resolution video streams is safety-critical for many robotics applications such as autonomous driving. Image downsampling is a commonly adopted technique to ensure the latency constraint is met. However, this naive approach greatly restricts an object detector's capability to identify small objects. In this paper, we propose an attentional approach that elastically magnifies certain regions while maintaining a small input canvas. The magnified regions are those that are believed to have a high probability of containing an object, whose signal can come from a dataset-wide prior or frame-level prior computed from recent object predictions. The magnification is implemented by a KDE-based mapping to transform the bounding boxes into warping parameters, which are then fed into an image sampler with anti-cropping regularization. The detector is then fed with the warped image and we apply a differentiable backward mapping to get bounding box outputs in the original space. Our regional magnification allows algorithms to make better use of high-resolution input without incurring the cost of high-resolution processing. On the autonomous driving datasets Argoverse-HD and BDD100K, we show our proposed method boosts the detection AP over standard Faster R-CNN, with and without finetuning. Additionally, building on top of the previous state-of-the-art in streaming detection, our method sets a new record for streaming AP on Argoverse-HD (from 17.8 to 23.0 on a GTX 1080 Ti GPU), suggesting that it has achieved a superior accuracy-latency tradeoff.