 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollowing Closely: A Robust Monocular Person Following System for Mobile Robot
Paper and Code
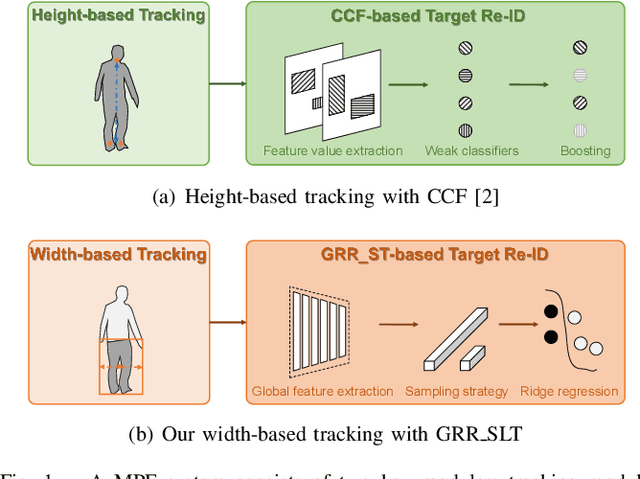
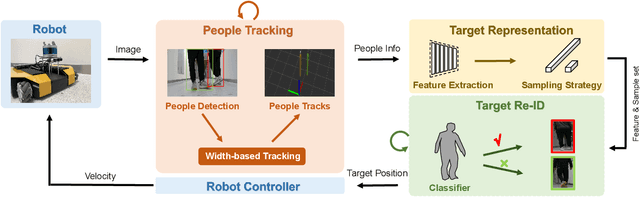
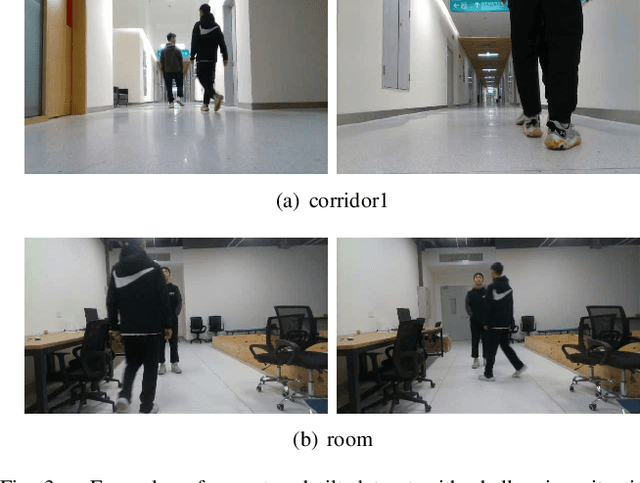
Monocular person following (MPF) is a capability that supports many useful applications of a mobile robot. However, existing MPF solutions are not completely satisfactory. Firstly, they often fail to track the target at a close distance either because they are based on a visual servo or they need the observation of the full body by the robot. Secondly, their target Re-IDentification (Re-ID) abilities are weak in cases of target appearance change and highly similar appearance of distracting people. To remove the assumption of full-body observation, we propose a width-based tracking module, which relies on the target width, which can be observed even at a close distance. For handling issues related to appearance variation, we use a global CNN (convolutional neural network) descriptor to represent the target and a ridge regression model to learn a target appearance model online. We adopt a sampling strategy for online classifier learning, in which both long-term and short-term samples are involved. We evaluate our method in two datasets including a public person following dataset and a custom-built one with challenging target appearance and target distance. Our method achieves state-of-the-art (SOTA) results on both datasets. For the benefit of the community, we make public the dataset and the source code.