 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollow your Nose: Using General Value Functions for Directed Exploration in Reinforcement Learning
Paper and Code
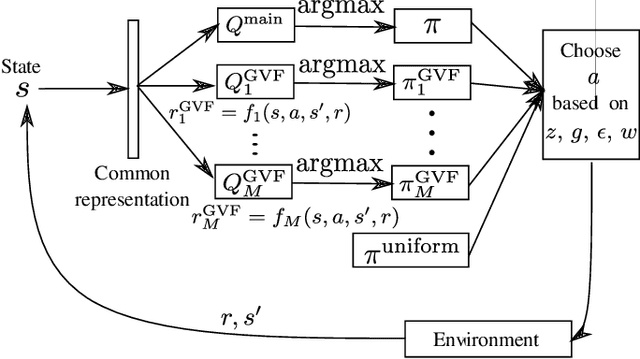
Exploration versus exploitation dilemma is a significant problem in reinforcement learning (RL), particularly in complex environments with large state space and sparse rewards. When optimizing for a particular goal, running simple smaller tasks can often be a good way to learn additional information about the environment. Exploration methods have been used to sample better trajectories from the environment for improved performance while auxiliary tasks have been incorporated generally where the reward is sparse. If there is little reward signal available, the agent requires clever exploration strategies to reach parts of the state space that contain relevant sub-goals. However, that exploration needs to be balanced with the need for exploiting the learned policy. This paper explores the idea of combining exploration with auxiliary task learning using General Value Functions (GVFs) and a directed exploration strategy. We provide a simple way to learn options (sequences of actions) instead of having to handcraft them, and demonstrate the performance advantage in three navigation tasks.