 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowDPS: Flow-Driven Posterior Sampling for Inverse Problems
Paper and Code
Mar 11, 2025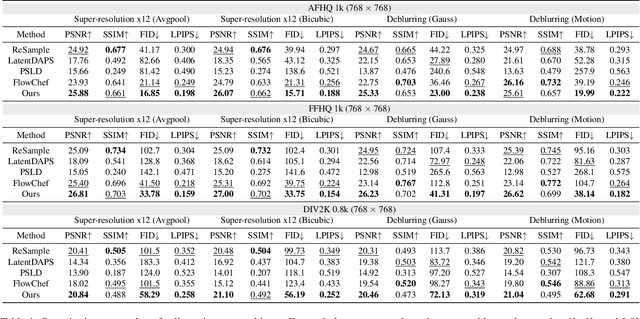
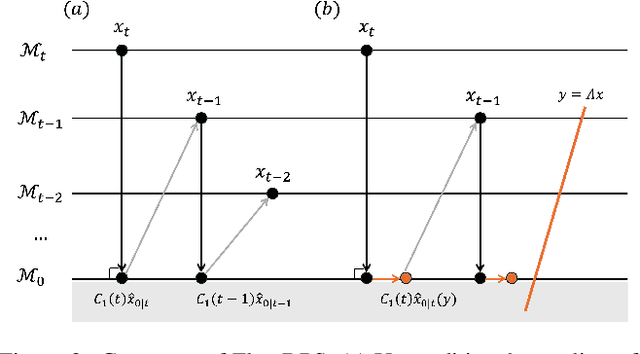
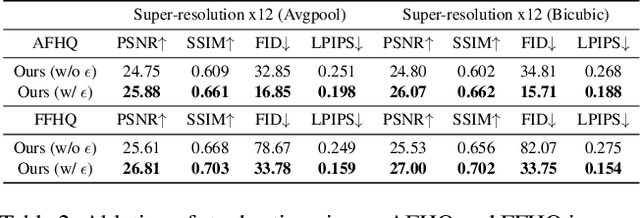
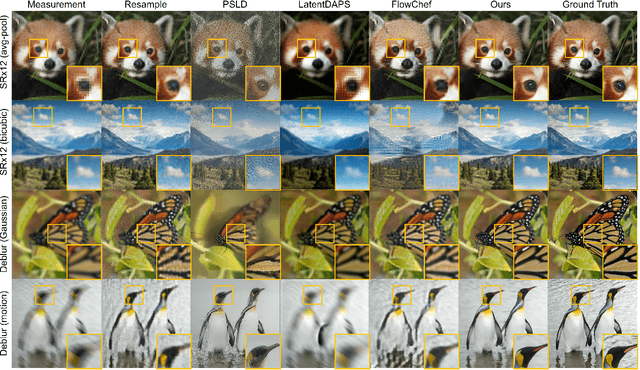
Flow matching is a recent state-of-the-art framework for generative modeling based on ordinary differential equations (ODEs). While closely related to diffusion models, it provides a more general perspective on generative modeling. Although inverse problem solving has been extensively explored using diffusion models, it has not been rigorously examined within the broader context of flow models. Therefore, here we extend the diffusion inverse solvers (DIS) - which perform posterior sampling by combining a denoising diffusion prior with an likelihood gradient - into the flow framework. Specifically, by driving the flow-version of Tweedie's formula, we decompose the flow ODE into two components: one for clean image estimation and the other for noise estimation. By integrating the likelihood gradient and stochastic noise into each component, respectively, we demonstrate that posterior sampling for inverse problem solving can be effectively achieved using flows. Our proposed solver, Flow-Driven Posterior Sampling (FlowDPS), can also be seamlessly integrated into a latent flow model with a transformer architecture. Across four linear inverse problems, we confirm that FlowDPS outperforms state-of-the-art alternatives, all without requiring additional training.