 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFloorplan-Aware Camera Poses Refinement
Paper and Code
Oct 10, 2022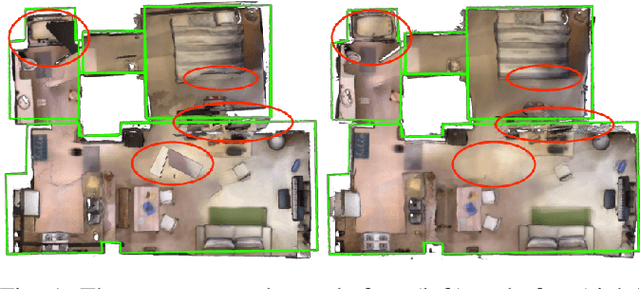
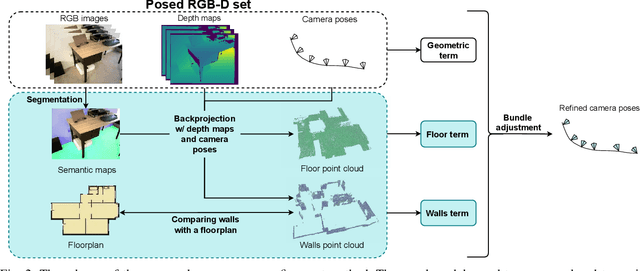
Processing large indoor scenes is a challenging task, as scan registration and camera trajectory estimation methods accumulate errors across time. As a result, the quality of reconstructed scans is insufficient for some applications, such as visual-based localization and navigation, where the correct position of walls is crucial. For many indoor scenes, there exists an image of a technical floorplan that contains information about the geometry and main structural elements of the scene, such as walls, partitions, and doors. We argue that such a floorplan is a useful source of spatial information, which can guide a 3D model optimization. The standard RGB-D 3D reconstruction pipeline consists of a tracking module applied to an RGB-D sequence and a bundle adjustment (BA) module that takes the posed RGB-D sequence and corrects the camera poses to improve consistency. We propose a novel optimization algorithm expanding conventional BA that leverages the prior knowledge about the scene structure in the form of a floorplan. Our experiments on the Redwood dataset and our self-captured data demonstrate that utilizing floorplan improves accuracy of 3D reconstructions.