 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFloorNet: A Unified Framework for Floorplan Reconstruction from 3D Scans
Paper and Code
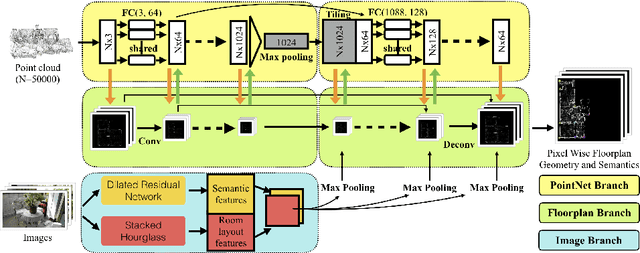

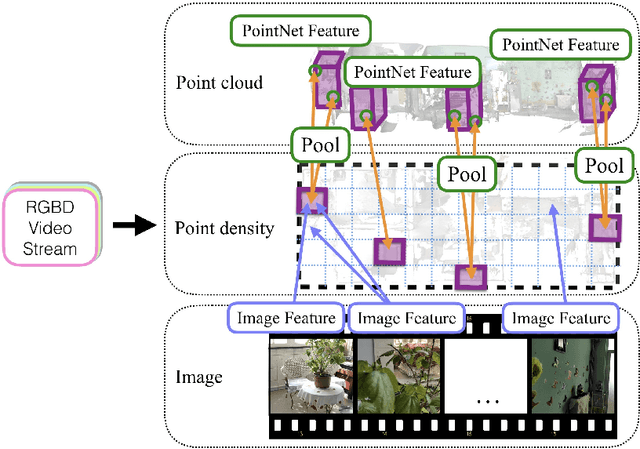
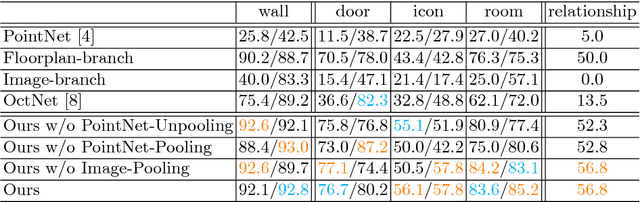
The ultimate goal of this indoor mapping research is to automatically reconstruct a floorplan simply by walking through a house with a smartphone in a pocket. This paper tackles this problem by proposing FloorNet, a novel deep neural architecture. The challenge lies in the processing of RGBD streams spanning a large 3D space. FloorNet effectively processes the data through three neural network branches: 1) PointNet with 3D points, exploiting the 3D information; 2) CNN with a 2D point density image in a top-down view, enhancing the local spatial reasoning; and 3) CNN with RGB images, utilizing the full image information. FloorNet exchanges intermediate features across the branches to exploit the best of all the architectures. We have created a benchmark for floorplan reconstruction by acquiring RGBD video streams for 155 residential houses or apartments with Google Tango phones and annotating complete floorplan information. Our qualitative and quantitative evaluations demonstrate that the fusion of three branches effectively improves the reconstruction quality. We hope that the paper together with the benchmark will be an important step towards solving a challenging vector-graphics reconstruction problem. Code and data are available at https://github.com/art-programmer/FloorNet.