 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Point Cloud Semantic Segmentation via Contrastive Self-Supervision and Multi-Resolution Attention
Paper and Code
Feb 21, 2023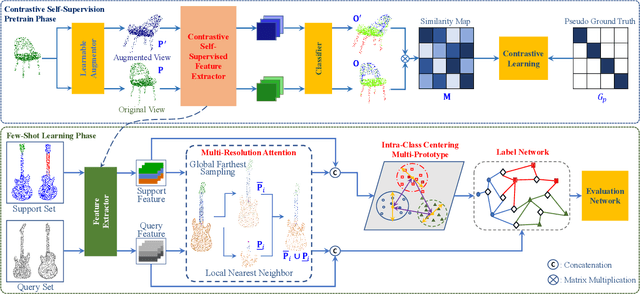
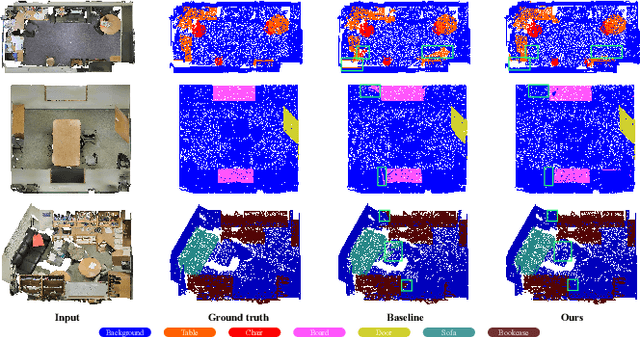
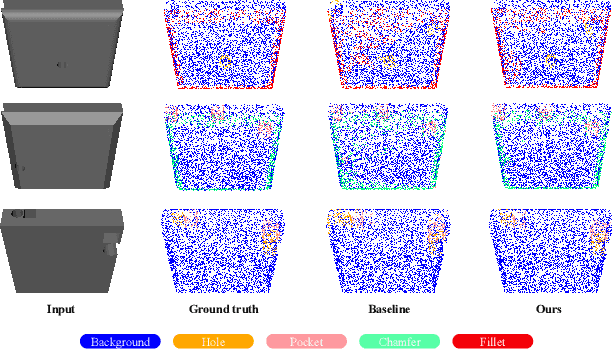
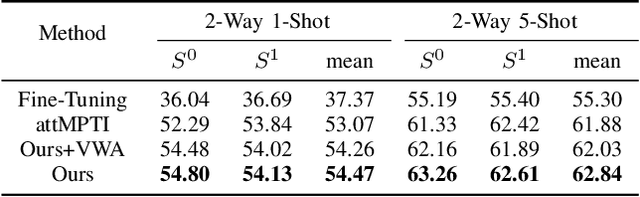
This paper presents an effective few-shot point cloud semantic segmentation approach for real-world applications. Existing few-shot segmentation methods on point cloud heavily rely on the fully-supervised pretrain with large annotated datasets, which causes the learned feature extraction bias to those pretrained classes. However, as the purpose of few-shot learning is to handle unknown/unseen classes, such class-specific feature extraction in pretrain is not ideal to generalize into new classes for few-shot learning. Moreover, point cloud datasets hardly have a large number of classes due to the annotation difficulty. To address these issues, we propose a contrastive self-supervision framework for few-shot learning pretrain, which aims to eliminate the feature extraction bias through class-agnostic contrastive supervision. Specifically, we implement a novel contrastive learning approach with a learnable augmentor for a 3D point cloud to achieve point-wise differentiation, so that to enhance the pretrain with managed overfitting through the self-supervision. Furthermore, we develop a multi-resolution attention module using both the nearest and farthest points to extract the local and global point information more effectively, and a center-concentrated multi-prototype is adopted to mitigate the intra-class sparsity. Comprehensive experiments are conducted to evaluate the proposed approach, which shows our approach achieves state-of-the-art performance. Moreover, a case study on practical CAM/CAD segmentation is presented to demonstrate the effectiveness of our approach for real-world applications.