 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Object Detection in Real Life: Case Study on Auto-Harvest
Paper and Code
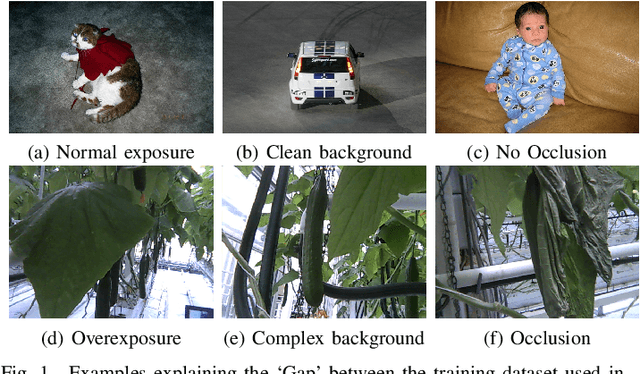
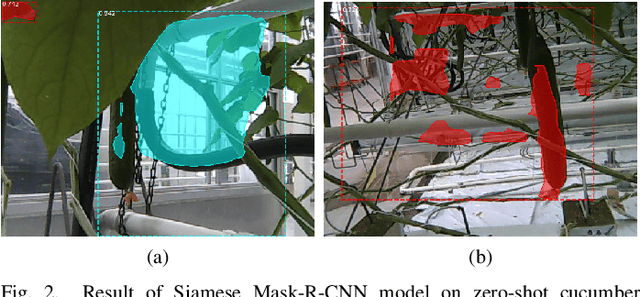
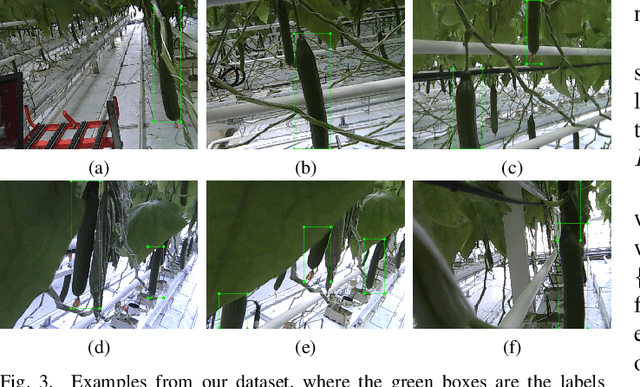
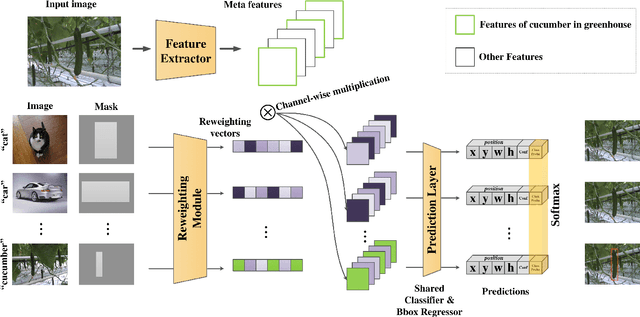
Confinement during COVID-19 has caused serious effects on agriculture all over the world. As one of the efficient solutions, mechanical harvest/auto-harvest that is based on object detection and robotic harvester becomes an urgent need. Within the auto-harvest system, robust few-shot object detection model is one of the bottlenecks, since the system is required to deal with new vegetable/fruit categories and the collection of large-scale annotated datasets for all the novel categories is expensive. There are many few-shot object detection models that were developed by the community. Yet whether they could be employed directly for real life agricultural applications is still questionable, as there is a context-gap between the commonly used training datasets and the images collected in real life agricultural scenarios. To this end, in this study, we present a novel cucumber dataset and propose two data augmentation strategies that help to bridge the context-gap. Experimental results show that 1) the state-of-the-art few-shot object detection model performs poorly on the novel `cucumber' category; and 2) the proposed augmentation strategies outperform the commonly used ones.