Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeedback Control for Autonomous Riding of Hovershoes by a Cassie Bipedal Robot
Paper and Code
Jul 26, 2019

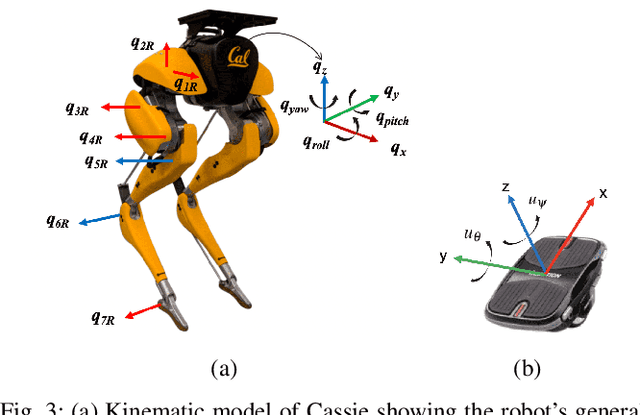
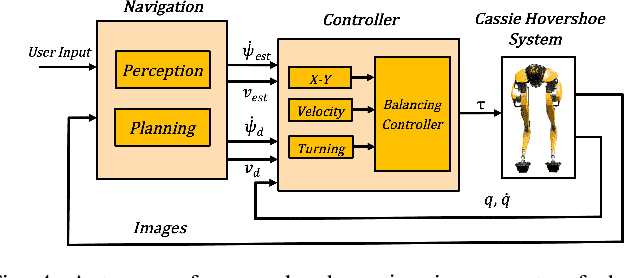
Motivated towards achieving multi-modal locomotion, in this paper, we develop a framework for a bipedal robot to dynamically ride a pair of Hovershoes over various terrain. Our developed control strategy enables the Cassie bipedal robot to interact with the Hovershoes to balance, regulate forward and rotational velocity, achieve fast turns, and move over flat terrain, slopes, stairs, and rough outdoor terrain. Our sensor suite comprising of VIO and depth sensors for visual SLAM as well as our Dijkstra-based global planner and timed elastic band based local planning framework enables us to achieve autonomous riding on the Hovershoes while navigating an obstacle course. We present numerical and experimental validations of our work.
View paper on