 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Space Transfer for Data Augmentation
Paper and Code
Feb 01, 2018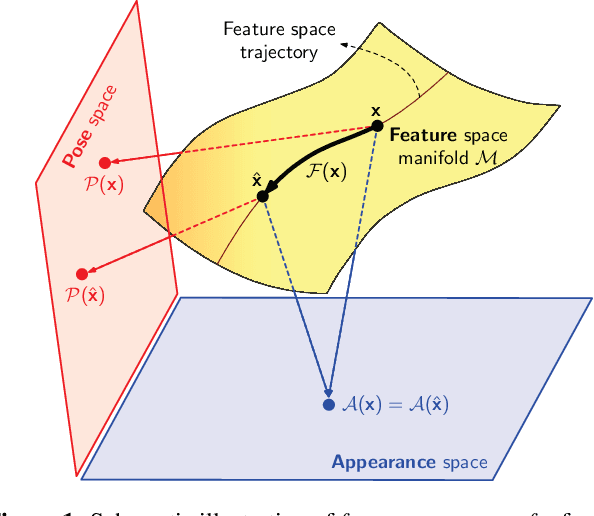
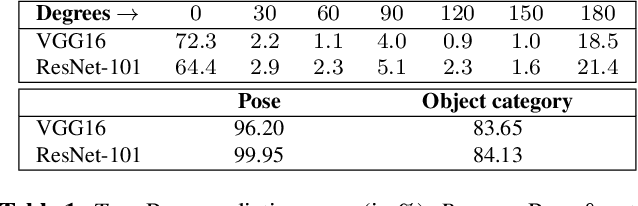
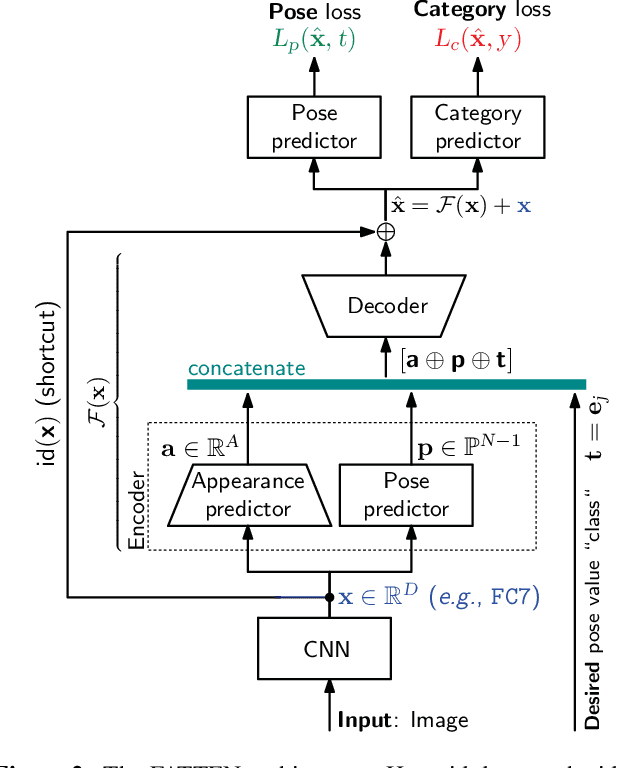

The problem of data augmentation in feature space is considered. A new architecture, denoted the FeATure TransfEr Network (FATTEN), is proposed for the modeling of feature trajectories induced by variations of object pose. This architecture exploits a parametrization of the pose manifold in terms of pose and appearance. This leads to a deep encoder/decoder network architecture, where the encoder factors into an appearance and a pose predictor. Unlike previous attempts at trajectory transfer, FATTEN can be efficiently trained end-to-end, with no need to train separate feature transfer functions. This is realized by supplying the decoder with information about a target pose and the use of a multi-task loss that penalizes category- and pose-mismatches. In result, FATTEN discourages discontinuous or non-smooth trajectories that fail to capture the structure of the pose manifold, and generalizes well on object recognition tasks involving large pose variation. Experimental results on the artificial ModelNet database show that it can successfully learn to map source features to target features of a desired pose, while preserving class identity. Most notably, by using feature space transfer for data augmentation (w.r.t. pose and depth) on SUN-RGBD objects, we demonstrate considerable performance improvements on one/few-shot object recognition in a transfer learning setup, compared to current state-of-the-art methods.