 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastRSR: Efficient and Accurate Road Surface Reconstruction from Bird's Eye View
Paper and Code
Apr 13, 2025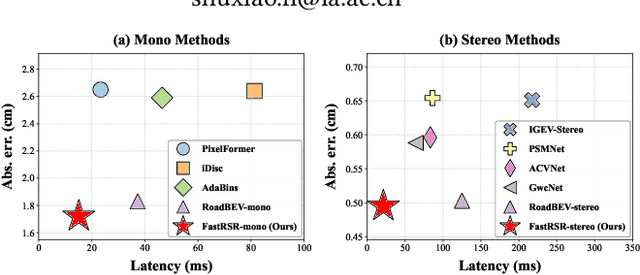
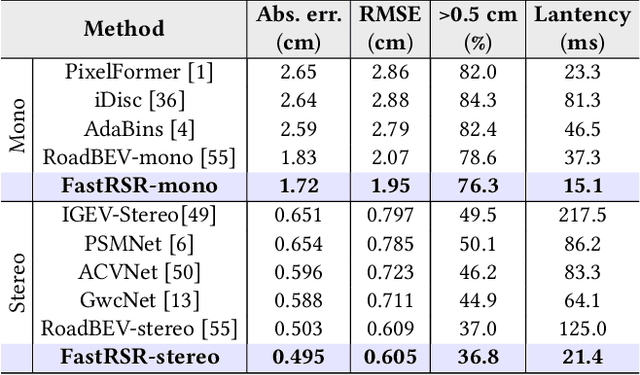
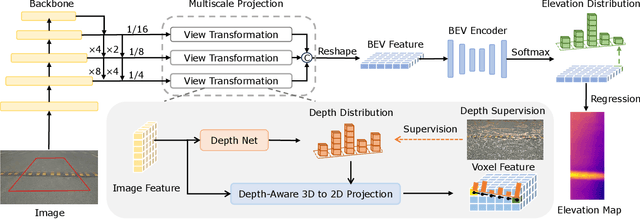
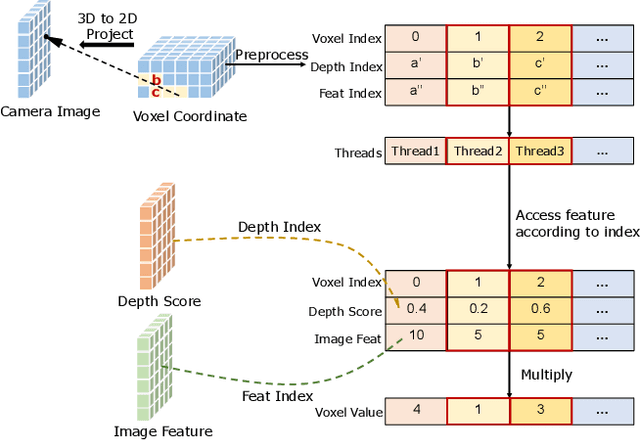
Road Surface Reconstruction (RSR) is crucial for autonomous driving, enabling the understanding of road surface conditions. Recently, RSR from the Bird's Eye View (BEV) has gained attention for its potential to enhance performance. However, existing methods for transforming perspective views to BEV face challenges such as information loss and representation sparsity. Moreover, stereo matching in BEV is limited by the need to balance accuracy with inference speed. To address these challenges, we propose two efficient and accurate BEV-based RSR models: FastRSR-mono and FastRSR-stereo. Specifically, we first introduce Depth-Aware Projection (DAP), an efficient view transformation strategy designed to mitigate information loss and sparsity by querying depth and image features to aggregate BEV data within specific road surface regions using a pre-computed look-up table. To optimize accuracy and speed in stereo matching, we design the Spatial Attention Enhancement (SAE) and Confidence Attention Generation (CAG) modules. SAE adaptively highlights important regions, while CAG focuses on high-confidence predictions and filters out irrelevant information. FastRSR achieves state-of-the-art performance, exceeding monocular competitors by over 6.0% in elevation absolute error and providing at least a 3.0x speedup by stereo methods on the RSRD dataset. The source code will be released.