 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAST3D: Flow-Aware Self-Training for 3D Object Detectors
Paper and Code
Oct 18, 2021
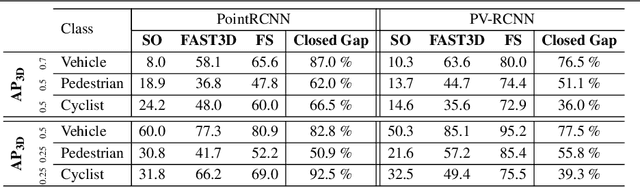
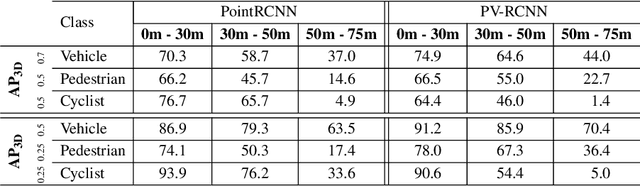
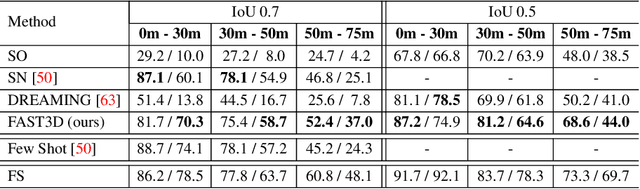
In the field of autonomous driving, self-training is widely applied to mitigate distribution shifts in LiDAR-based 3D object detectors. This eliminates the need for expensive, high-quality labels whenever the environment changes (e.g., geographic location, sensor setup, weather condition). State-of-the-art self-training approaches, however, mostly ignore the temporal nature of autonomous driving data. To address this issue, we propose a flow-aware self-training method that enables unsupervised domain adaptation for 3D object detectors on continuous LiDAR point clouds. In order to get reliable pseudo-labels, we leverage scene flow to propagate detections through time. In particular, we introduce a flow-based multi-target tracker, that exploits flow consistency to filter and refine resulting tracks. The emerged precise pseudo-labels then serve as a basis for model re-training. Starting with a pre-trained KITTI model, we conduct experiments on the challenging Waymo Open Dataset to demonstrate the effectiveness of our approach. Without any prior target domain knowledge, our results show a significant improvement over the state-of-the-art.