 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Task-Based Adaptive Sampling for 3D Single-Photon Multispectral Lidar Data
Paper and Code
Sep 03, 2021


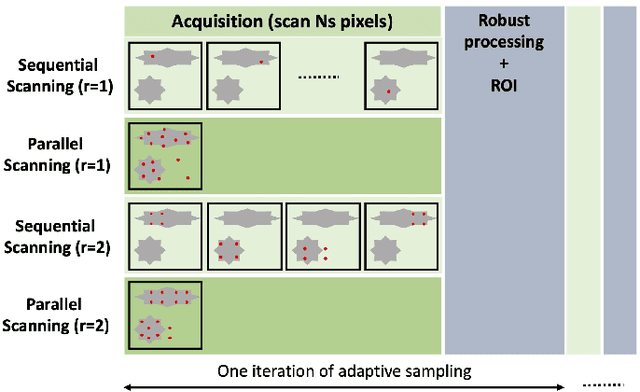
3D single-photon LiDAR imaging plays an important role in numerous applications. However, long acquisition times and significant data volumes present a challenge to LiDAR imaging. This paper proposes a task-optimized adaptive sampling framework that enables fast acquisition and processing of high-dimensional single-photon LiDAR data. Given a task of interest, the iterative sampling strategy targets the most informative regions of a scene which are defined as those minimizing parameter uncertainties. The task is performed by considering a Bayesian model that is carefully built to allow fast per-pixel computations while delivering parameter estimates with quantified uncertainties. The framework is demonstrated on multispectral 3D single-photon LiDAR imaging when considering object classification and/or target detection as tasks. It is also analysed for both sequential and parallel scanning modes for different detector array sizes. Results on simulated and real data show the benefit of the proposed optimized sampling strategy when compared to fixed sampling strategies.