 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Online Object Tracking and Segmentation: A Unifying Approach
Paper and Code
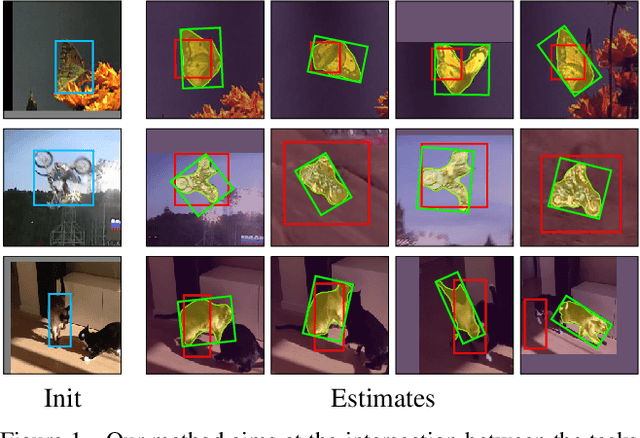



In this paper we illustrate how to perform both visual object tracking and semi-supervised video object segmentation, in real-time, with a single simple approach. Our method, dubbed SiamMask, improves the offline training procedure of popular fully-convolutional Siamese approaches for object tracking by augmenting their loss with a binary segmentation task. Once trained, SiamMask solely relies on a single bounding box initialisation and operates online, producing class-agnostic object segmentation masks and rotated bounding boxes at 35 frames per second. Despite its simplicity, versatility and fast speed, our strategy allows us to establish a new state-of-the-art among real-time trackers on VOT-2018, while at the same time demonstrating competitive performance and the best speed for the semi-supervised video object segmentation task on DAVIS-2016 and DAVIS-2017. The project website is http://www.robots.ox.ac.uk/~qwang/SiamMask.