 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast On-Line Kernel Density Estimation for Active Object Localization
Paper and Code
Nov 16, 2016
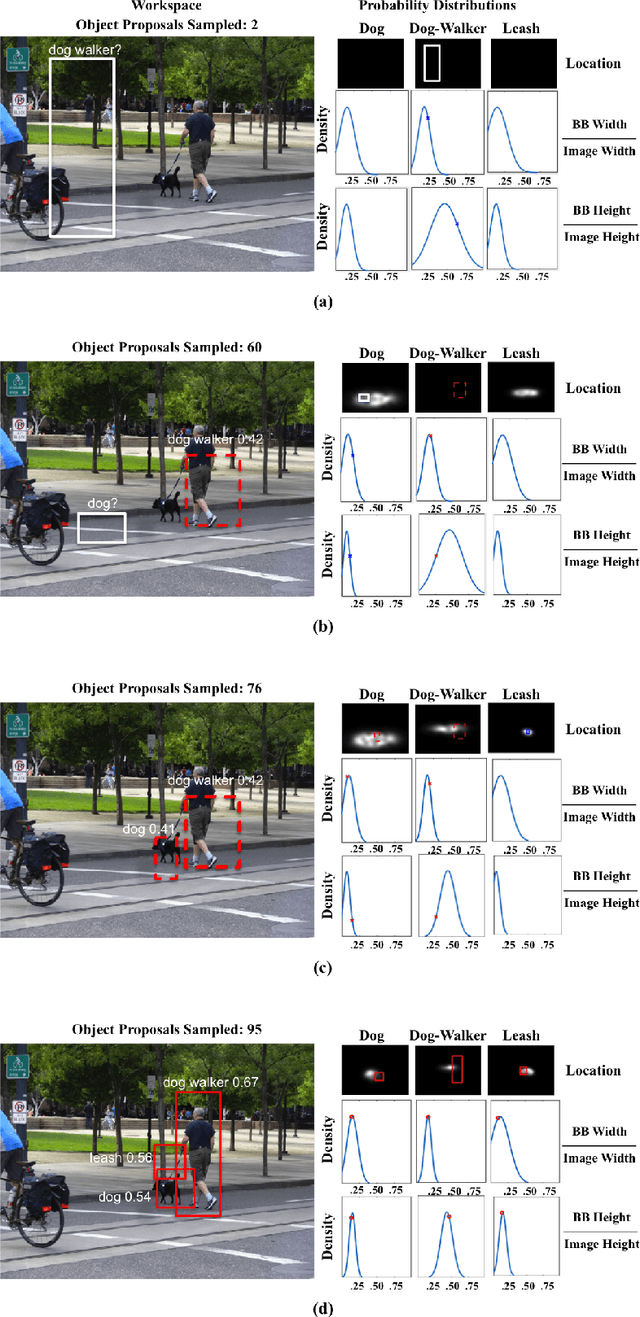
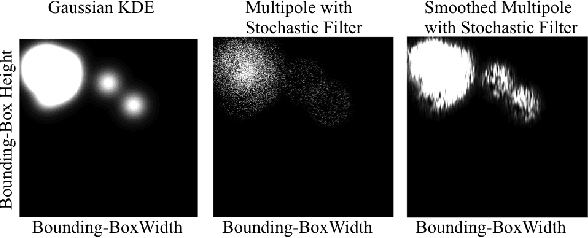

A major goal of computer vision is to enable computers to interpret visual situations---abstract concepts (e.g., "a person walking a dog," "a crowd waiting for a bus," "a picnic") whose image instantiations are linked more by their common spatial and semantic structure than by low-level visual similarity. In this paper, we propose a novel method for prior learning and active object localization for this kind of knowledge-driven search in static images. In our system, prior situation knowledge is captured by a set of flexible, kernel-based density estimations---a situation model---that represent the expected spatial structure of the given situation. These estimations are efficiently updated by information gained as the system searches for relevant objects, allowing the system to use context as it is discovered to narrow the search. More specifically, at any given time in a run on a test image, our system uses image features plus contextual information it has discovered to identify a small subset of training images---an importance cluster---that is deemed most similar to the given test image, given the context. This subset is used to generate an updated situation model in an on-line fashion, using an efficient multipole expansion technique. As a proof of concept, we apply our algorithm to a highly varied and challenging dataset consisting of instances of a "dog-walking" situation. Our results support the hypothesis that dynamically-rendered, context-based probability models can support efficient object localization in visual situations. Moreover, our approach is general enough to be applied to diverse machine learning paradigms requiring interpretable, probabilistic representations generated from partially observed data.