 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Motion Understanding with Spatiotemporal Neural Networks and Dynamic Vision Sensors
Paper and Code
Nov 18, 2020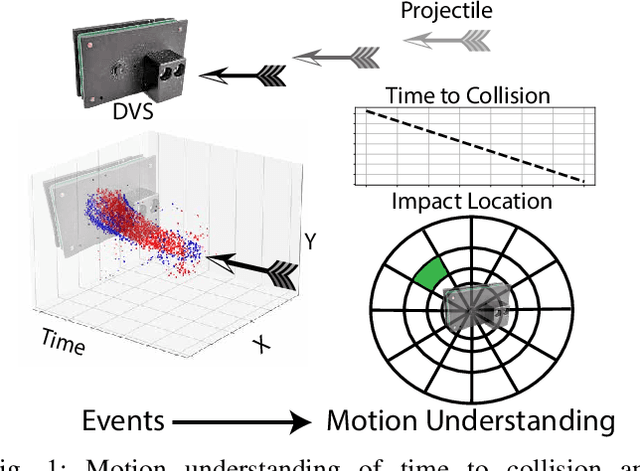
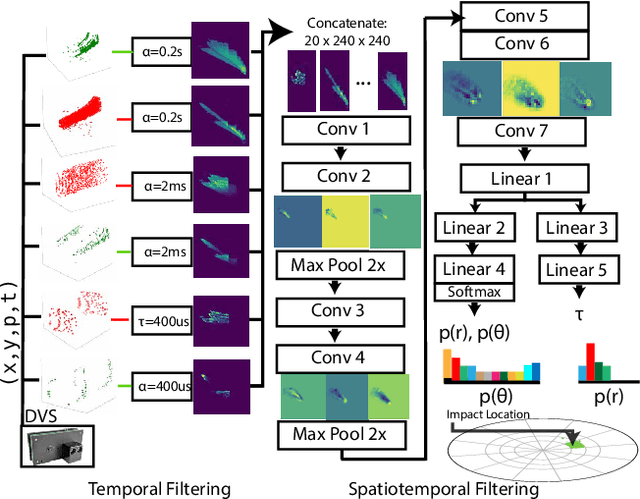
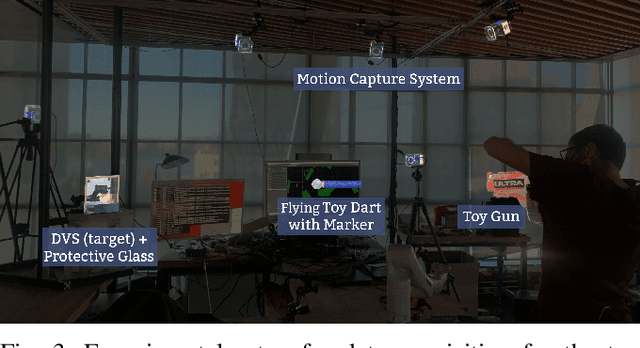
This paper presents a Dynamic Vision Sensor (DVS) based system for reasoning about high speed motion. As a representative scenario, we consider the case of a robot at rest reacting to a small, fast approaching object at speeds higher than 15m/s. Since conventional image sensors at typical frame rates observe such an object for only a few frames, estimating the underlying motion presents a considerable challenge for standard computer vision systems and algorithms. In this paper we present a method motivated by how animals such as insects solve this problem with their relatively simple vision systems. Our solution takes the event stream from a DVS and first encodes the temporal events with a set of causal exponential filters across multiple time scales. We couple these filters with a Convolutional Neural Network (CNN) to efficiently extract relevant spatiotemporal features. The combined network learns to output both the expected time to collision of the object, as well as the predicted collision point on a discretized polar grid. These critical estimates are computed with minimal delay by the network in order to react appropriately to the incoming object. We highlight the results of our system to a toy dart moving at 23.4m/s with a 24.73{\deg} error in ${\theta}$, 18.4mm average discretized radius prediction error, and 25.03% median time to collision prediction error.