Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Gaussian Process Occupancy Maps
Paper and Code
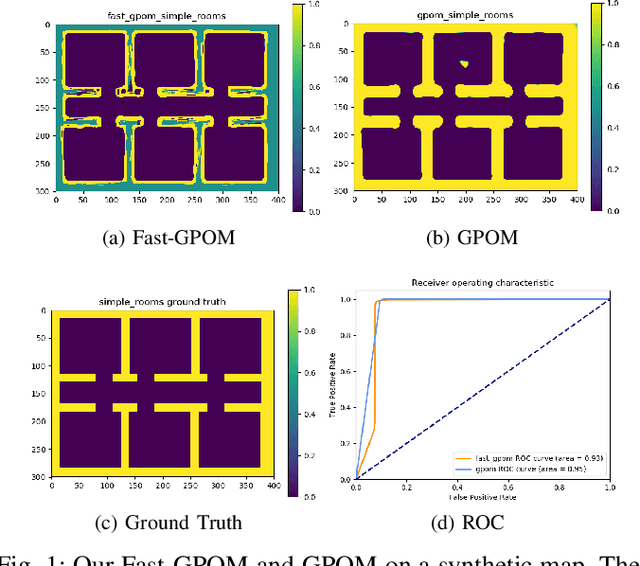

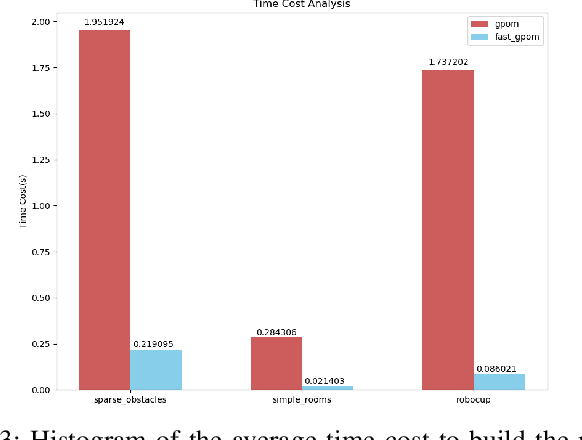

In this paper, we demonstrate our work on Gaussian Process Occupancy Mapping (GPOM). We concentrate on the inefficiency of the frame computation of the classical GPOM approaches. In robotics, most of the algorithms are required to run in real time. However, the high cost of computation makes the classical GPOM less useful. In this paper we dont try to optimize the Gaussian Process itself, instead, we focus on the application. By analyzing the time cost of each step of the algorithm, we find a way that to reduce the cost while maintaining a good performance compared to the general GPOM framework. From our experiments, we can find that our model enables GPOM to run online and achieve a relatively better quality than the classical GPOM.
* Accepted to ICARCV2018
View paper on