Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast 2D Map Matching Based on Area Graphs
Paper and Code
Nov 18, 2019
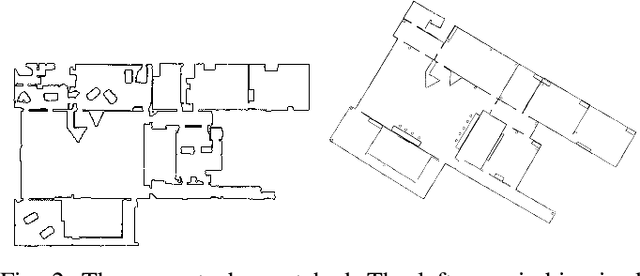
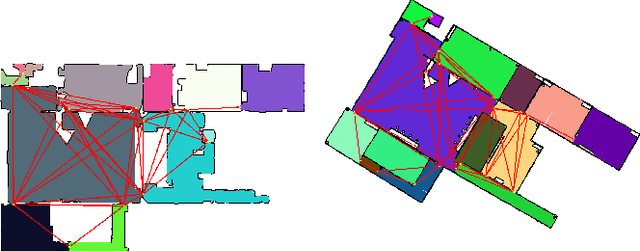

We present a novel area matching algorithm for merging two different 2D grid maps. There are many approaches to address this problem, nevertheless, most previous work is built on some assumptions, such as rigid transformation, or similar scale and modalities of two maps. In this work we propose a 2D map matching algorithm based on area segmentation. We transfer general 2D occupancy grid maps to an area graph representation, then compute the correct results by voting in that space. In the experiments, we compare with a state-of-the-art method applied to the matching of sensor maps with ground truth layout maps. The experiment shows that our algorithm has a better performance on large-scale maps and a faster computation speed.
* 8 pages, 42 figures, accepted by Robio 2019
View paper on