 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAR Planner: Fast, Attemptable Route Planner using Dynamic Visibility Update
Paper and Code

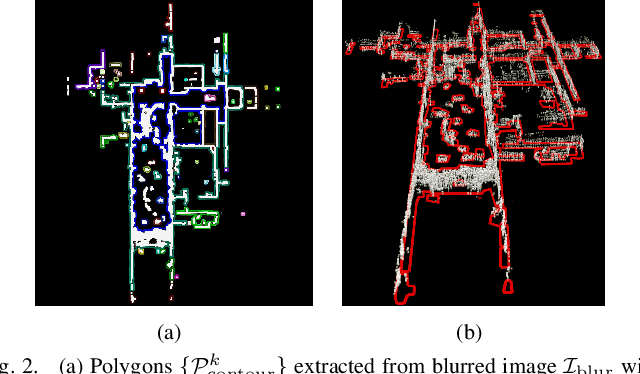

We present our work on a fast route planner based on visibility graph. The method extracts edge points around obstacles in the environment to form polygons, with which, the method dynamically updates a global visibility graph, expanding the visibility graph along with the navigation and removing edges that become occluded by dynamic obstacles. When guiding a vehicle to the goal, the method can deal with both known and unknown environments. In the latter case, the method is attemptable in discovering a way to the goal by picking up the environment layout on the fly. We evaluate the method using both ground and aerial vehicles, in simulated and real-world settings. In highly convoluted unknown or partially known environments, our method is able to reduce travel time by 13-27% compared to RRT*, RRT-Connect, A*, and D* Lite, and finds a path within 3ms in all of our experiments.