 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFABG : End-to-end Imitation Learning for Embodied Affective Human-Robot Interaction
Paper and Code
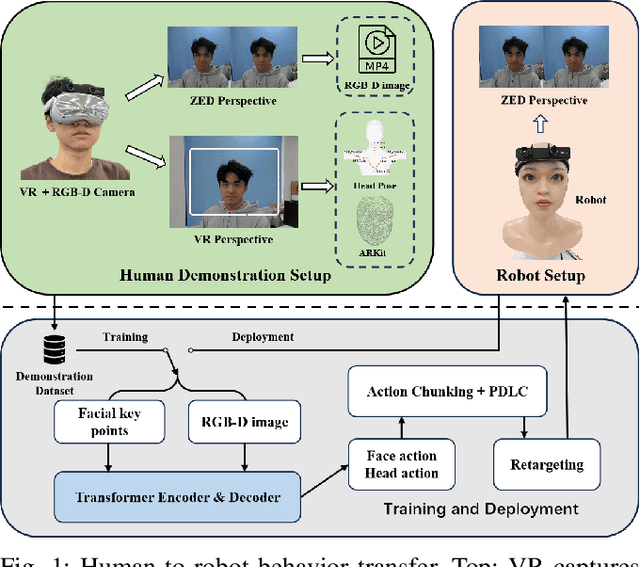
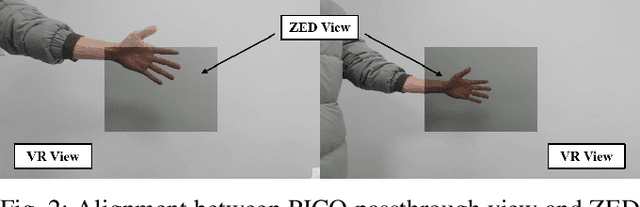
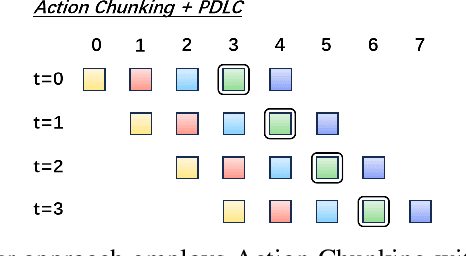
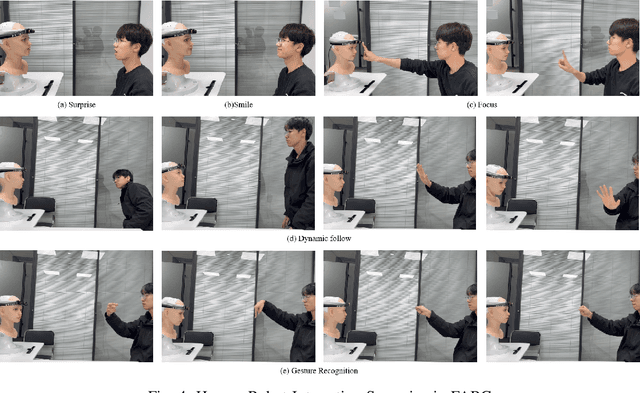
This paper proposes FABG (Facial Affective Behavior Generation), an end-to-end imitation learning system for human-robot interaction, designed to generate natural and fluid facial affective behaviors. In interaction, effectively obtaining high-quality demonstrations remains a challenge. In this work, we develop an immersive virtual reality (VR) demonstration system that allows operators to perceive stereoscopic environments. This system ensures "the operator's visual perception matches the robot's sensory input" and "the operator's actions directly determine the robot's behaviors" - as if the operator replaces the robot in human interaction engagements. We propose a prediction-driven latency compensation strategy to reduce robotic reaction delays and enhance interaction fluency. FABG naturally acquires human interactive behaviors and subconscious motions driven by intuition, eliminating manual behavior scripting. We deploy FABG on a real-world 25-degree-of-freedom (DoF) humanoid robot, validating its effectiveness through four fundamental interaction tasks: expression response, dynamic gaze, foveated attention, and gesture recognition, supported by data collection and policy training. Project website: https://cybergenies.github.io