 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtracting Actionability from Machine Learning Models by Sub-optimal Deterministic Planning
Paper and Code
Nov 03, 2016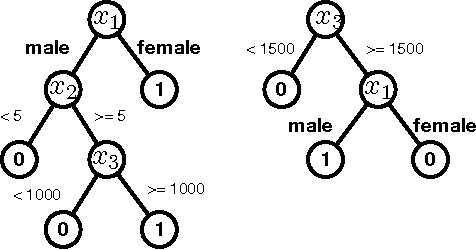
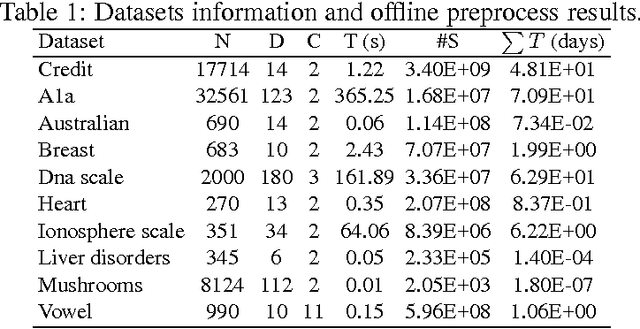
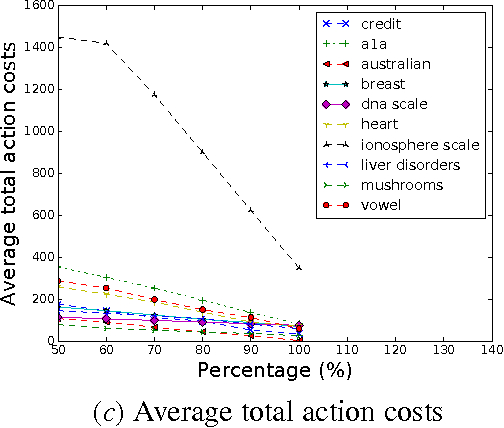
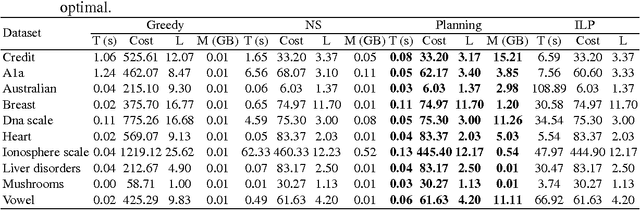
A main focus of machine learning research has been improving the generalization accuracy and efficiency of prediction models. Many models such as SVM, random forest, and deep neural nets have been proposed and achieved great success. However, what emerges as missing in many applications is actionability, i.e., the ability to turn prediction results into actions. For example, in applications such as customer relationship management, clinical prediction, and advertisement, the users need not only accurate prediction, but also actionable instructions which can transfer an input to a desirable goal (e.g., higher profit repays, lower morbidity rates, higher ads hit rates). Existing effort in deriving such actionable knowledge is few and limited to simple action models which restricted to only change one attribute for each action. The dilemma is that in many real applications those action models are often more complex and harder to extract an optimal solution. In this paper, we propose a novel approach that achieves actionability by combining learning with planning, two core areas of AI. In particular, we propose a framework to extract actionable knowledge from random forest, one of the most widely used and best off-the-shelf classifiers. We formulate the actionability problem to a sub-optimal action planning (SOAP) problem, which is to find a plan to alter certain features of a given input so that the random forest would yield a desirable output, while minimizing the total costs of actions. Technically, the SOAP problem is formulated in the SAS+ planning formalism, and solved using a Max-SAT based approach. Our experimental results demonstrate the effectiveness and efficiency of the proposed approach on a personal credit dataset and other benchmarks. Our work represents a new application of automated planning on an emerging and challenging machine learning paradigm.