 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal Force Field Modeling for Autonomous Surface Vehicles
Paper and Code
Sep 09, 2018
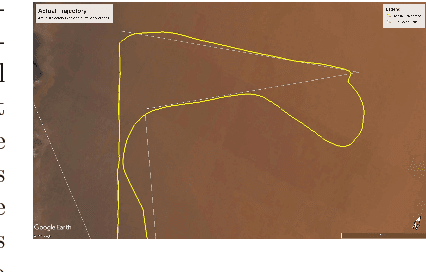

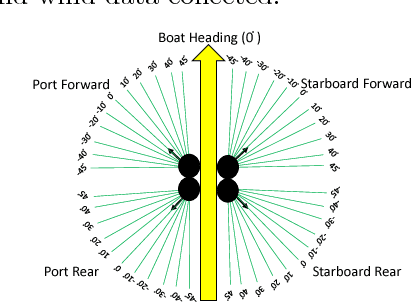
Operating in the presence of strong adverse forces is a particularly challenging problem in field robotics. In most robotic operations where the robot is not firmly grounded, such as aerial, surface, and underwater, minimal external forces are assumed as the standard operating procedures. The first action for operating in the presence of non-trivial forces is modeling the forces and their effect on the robots motion. In this work an Autonomous Surface Vehicle (ASV), operating on lakes and rivers with varying winds and currents, collects wind and current measurements with an inexpensive custom-made sensor suite setup, and generates a model of the force field. The modeling process takes into account depth, wind, and current measurements along with the ASVs trajectory from GPS. In this work, we propose a method for an ASV to build an environmental force map by integrating in a Gaussian Process the wind, depth, and current measurements gathered at the surface. We run extensive experimental field trials for our approach on real Jetyak ASVs. Experimental results from different locations validate the proposed modeling approach.